字體:小 中 大
字體:小 中 大 |
|
|
|
| 2020/01/07 06:31:30瀏覽1479|回應0|推薦5 | |
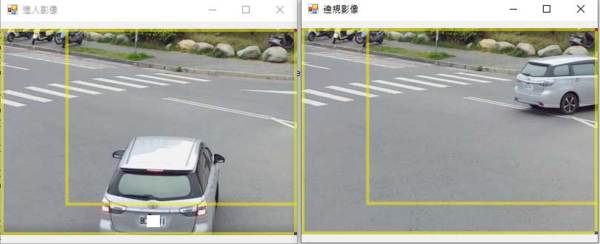
正在研究進行中的一個專案是要抓抄近路違規轉彎的車輛,如上圖這輛車,原本在此路口他只能左轉,如果跨越雙白線右轉,就是走進逆向車道了!如果有警察在場當然會立即攔車開罰單,但是如果是用攝影資料「科技執法」要怎麼抓呢?就是要有影像證據啦! 原本的構想很簡單,就是一路辨識車牌位置,如果該車牌跨過了雙白線那就是違規了!將此車進入攝影畫面的第一張有車牌影像,加上跨線時的那張影像輸出,就是違規的鐵證了!但尷尬的是:當車子跨線時車牌已經太小,角度又太斜,常常已經辨識不到了!所以犯罪當時的影像就不在我的「有車牌」辨識結果的資料中了! 我的建議是請承包單位(我的客戶)將攝影機拉到目前道路的左邊,這樣就可以正對剛剛跨線轉彎的車牌,我的既有軟體就可以提供該車跨線時的照片了!但是他們說馬路對面因為電源等問題無法架設攝影機,怎麼辦?好像死棋了!但是要難倒我還早咧!
因為是連續動態的影像嘛!使用前後兩格畫面相減的差異影像就可以概略看出車子的輪廓位置,如上圖。就是除了追蹤車牌之外,我也同時追蹤移動中的「車體」是不是跨線了?如果跨線就留下當時的影像,即使那個角度沒有辦法辨識到車牌也沒關係。如第一張圖所示,有車牌剛進入畫面的照片與跨線照片並陳,誰都可以確認是同一輛車,賴不掉了! 其實我們之前就研究過車體差異影像的動態追蹤,但是這種差異影像雜訊本來就大,室外的攝影機常會被風吹得不停晃動,雜訊就更大!所以不是不會做,或不能用這種技術,只是穩定性不夠好,不願意推出讓人嫌的次佳產品而已。但是如果像此案例,搭配車牌辨識追蹤作為輔助就還好!如果因為風大偶爾無法抓到跨線的事件,那也是非戰之罪,客戶可以體諒的! 現在只要有事件判斷功能的軟體,大家都會說是「AI人工智慧」,然後刻意不講清楚事件判斷的過程與原則,搞神祕就對了!就像區間測速根本就是兩個測站的車牌辨識結果比對計算出來的,但是所有的介紹文章卻故意的語焉不詳?你不會從那些文章中看到「車牌辨識」這個關鍵詞!越神秘好像就可以賣得越貴? 我不玩那一套的!其實內行人我不說他們也猜得到,我能蒙混的只是一般民眾與出錢買東西的客戶,我不想這樣!即使我將方法說出來,實作的難度還是擺在那邊,不表示我的工作就很簡單,或誰看了都能來搶生意,只是我不想用資訊的不對等來抬高價錢哄騙客戶而已。 按例我又要酸一下機器學習與深度學習了!面對這種複雜的判斷,他們一樣會將車牌辨識與動態差異影像的演算法與參數範圍丟給電腦去算,即使做出辨識率不錯的軟體,其實他們也不知道細節判斷流程與邏輯的!如果你問他怎麼算的?他就會說是「AI人工智慧」,那不是故作神秘,而是「真的不知道!」 以研究資料的角度來看,要能進行機器學習的前提是要有相當多的實際案例,也就是題庫!但是類似這種案子,施工單位連正式的攝影機都還沒架好,我是用他們到現場評估工程細節時順便錄下的幾個短片案例做研究的!如果是機器學習派根本還沒辦法開工?因為資料樣本數實在太少了!勉強做出來的東西判斷結果也一定荒腔走板!我的作法則只需要幾個案例為基礎,設計合理的演算法,做出來的軟體判斷能力就八九不離十了! 現實是:絕大多數的這種案例都是這樣,無法「事先」取得大量樣本資料的!在客戶的立場,攝影機一裝好就要開始驗收,做影像辨識科技執法了!但是機器學習派必須等幾個月之後,累積的案例才足以「開始」研發他們的軟體!這有意義嗎?到時我的軟體都在使用中了,也會不斷的回饋錯誤進行調整,那時還需要機器學習開發的軟體嗎?所以用機器學習做影像辨識,在我目前常做的案例中是毫無競爭力的! 機器學習不是沒用,在資料量過多,我們對於決策方式還千頭萬緒不得要領時,它們是很好的先驅者,可以快速地幫嚴謹的科學研究做「探路」的工作。他們可以是工具,但絕對不應該是人工智慧研究的核心主體!如果研究的資料不夠多時,它們連當工具使用的地位都沒有!人工智慧的核心技術應該是精確合理的演算法,機器學習最多只是串場的配角!絕對不是主角! |
|
| ( 心情隨筆|工作職場 ) |