字體:小 中 大
字體:小 中 大 |
|
|
|
| 2019/11/27 05:25:18瀏覽1079|回應0|推薦11 | |
我總覺得現在說AI人工智慧研發的新聞好像都在天上飄?我真的無法看出他們實際在做的事情?或許是商業機密吧?讓我想學都無從學起!所以我只能自己摸索,照我的能力可以能理解,我認為對的方式匍匐前進!那些聲稱酷炫的機器學習、深度學習與類神經網路我還是完全無法用得上加入我的產品! 我現在的主要產品之一是停車場的車牌辨識軟體,這個領域目前市場大,也是車牌辨識產品競爭最激烈的場域。大家都會故作神秘,讓客戶認為他們擁有神奇的密技?我呢?沒有甚麼神奇的密技,只想務實的研發,一個一個解決實際的問題,甚至可以分享大家我的作法經驗!至少讓買我產品的客戶知道我在幹甚麼?他們有權利知道的!因為他們已經付錢給我了嘛! 老實說,我的動態停車場軟體沒有實驗場,只是根據客戶給我的一些停車場出入口的影片做出來的!第一批影片抓出來的照片大概就是這樣的:
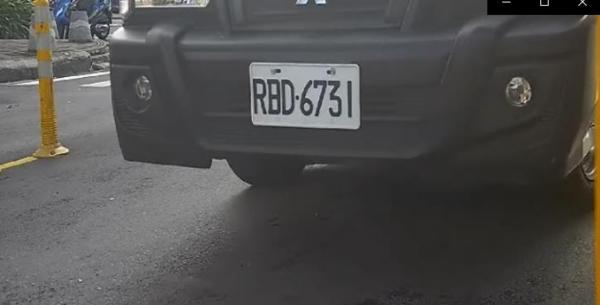
很完美吧?但是當我賣出軟體,因為各場地與廠商架設攝影機的方式與限制不同,辨識的標的可能會變成各種樣貌,譬如這樣:
並不是我的辨識核心無法辨識這種角度的車牌,而是我知道這種條件之下,即使是我的辨識核心很強,辨識的正確率也不會是98%或99%這麼高。但停車場是要求極高辨識正確率的,而且進行過程中「應該」會有較好的辨識角度,我就會自我篩選,放棄辨識這種較差辨識條件的資料了! 結果呢?就是有一些場地車子始終沒有較佳的角度距離,我自作聰明的自我設限就變成我的缺點了!辨識的甜蜜區變小,原始辨識資料變少,甚至沒有合格的資料!常見的狀況就是說我的軟體「反應慢」?其實是在等狀況很好時才開始辨識,太挑剔了!就像太挑對象的帥哥美女,最後人老珠黃年華老去,甚麼對象都找不到了!回歸到原點,我的問題就是「文不對題」!要說辨識能力,這樣的車牌我也能辨識的:
重點是我設計原始軟體時不知道「真實世界」的變異程度?每一個實際場域會發生多大的變化?如果身在非洲國家,想找理想對象卻直接排除所有黑人,那就很難找到好伴侶了!不是嗎?所以我的軟體要精進,關鍵就是客戶的回饋,如果他們可以讓我「到現場」觀察實況,我就知道如何得到最好的結果了! 網路時代了,其實所謂「現場實況」是可以連線轉播的!只要他們可以讓我連線看到攝影的實況,我就可以調整到辨識率最佳,最正確的狀況,很高興我的客戶真的給了我機會,也因此我可以從內部的辨識核心到外部的資料篩選統計都能繼續研發前進!好像我可以隨時到全台灣各地的幾十個停車場做研究。 這就是我做事的方式,我認為AI就是挖出人類腦中的智慧程式化,根據事實與你的演算法,找到最佳的,最精確的解決方案辨識流程!細節說起來或許很囉唆,但就是這樣!如果仔細說清楚,誰都可以理解,與我合作的客戶工程師都知道的!哪有甚麼神祕兮兮?神奇的AI人工智慧演算法?只是更準確的物理現象分析與數學化過程而已! 我只是一個鄉下小公司,我不會,也不想集資弄個超大實驗場來做「研發」,讓我的軟體無所不能!老實說,我也無法預期模擬出所有客戶會遭遇的狀況!我也沒有得到外星科技做出地球人無法理解的AI軟體,但是我絕對可以理解你的場地狀況,也有足夠的技術在你的場地建構出你要的東西,就看你要不要相信我?給我機會而已! |
|
| ( 心情隨筆|工作職場 ) |