字體:小 中 大
字體:小 中 大 |
|
|
|
| 2019/12/10 12:22:01瀏覽1296|回應0|推薦7 | |
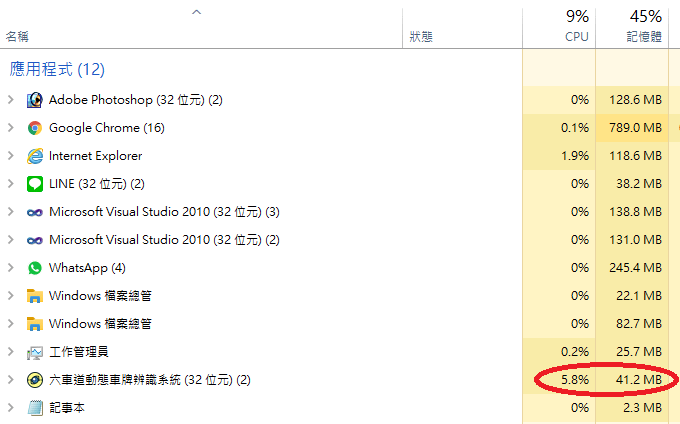
上面是我用一個遠端停車場的攝影機畫面模擬四個車道的動態辨識,就是四個車道都設定成同一個畫面重複辨識啦!我的程式不折不扣是一秒鐘會辨識約十次!四車道就是做每秒鐘做40次的辨識了!但是這麼頻繁的辨識之下,怎麼可能CPU只用了十幾趴呢?這還是全電腦的用量哦!我的程式大概只用了五六趴!連記憶體都只用到幾十M!相對於他正在做的事情,你能不驚呆嗎?
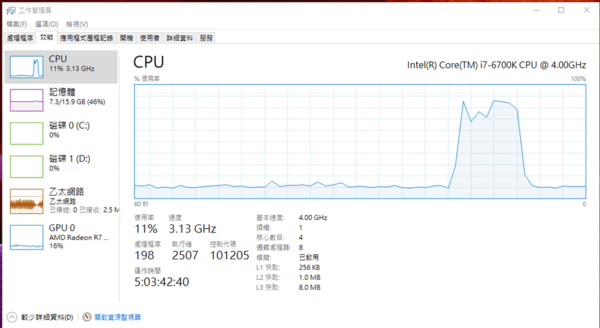
這就是影像「動態偵測」的功效了!用白話文說是:要畫面有動靜時他才會開始認真做完整的車牌辨識,如果畫面上沒有甚麼東西在動,他是不會作完整辨識的,所以運算量就很低了!但是他是不是真的醒著呢?會不會真有車子來時會叫不起床呢? 放心,不會的!事實上影像還是以每秒十張的速度在做觀察分析,每一張都和前一張做個比較,就是相減啦!如果差值變大了就是有動靜,立即開工辨識!如果真有車牌還會持續辨識下去,所以即使車子停住在畫面之中,也不表示就會停止辨識,所以我的軟體是知道車子在哪邊的!那麼如果四車道同時有車時會怎樣呢?當然就是全體動員囉!像下面這張圖一樣,但是車子過了就會很快回復平靜。
這個功能很重要嗎?當然重要!我的辨識軟體是要24小時全天候運作的,如果老老實實每一張都做完整的車牌辨識不是不可以,但是CPU就會一直很忙碌,大概會在五六十到九十幾趴之間震盪!那表示很耗電,也表示電腦可能壽命不會太長了! 我最得意的是:在持續保持高頻率監視畫面的前提下,CPU可以節省到這麼低的程度!即使是我的軟體有動態偵測機制之後,一開始沒車時也至少二三十趴的!是經過很多的研發調整,才能如此省電環保,還不會影響到應該做的工作。 會如此努力的原因之一,也是我知道其他以靜態車牌辨識為主的軟體架構都一定比我的軟體省電!因為實際辨識的影像頻率很低嘛!我既然要做動態辨識,就必須做到好像「持續」在看影像,運算量當然比較大!因此如果電腦損耗太快,甚至產生熱當機,那就變成是大缺點了! 現在呢?我完全不怕了!這是不是很像機車引擎的環保標準越來越高?越來越省油還降低汙染,我的軟體也越來越有環保概念了! |
|
| ( 心情隨筆|工作職場 ) |