字體:小 中 大
字體:小 中 大 |
|
|
|
| 2020/06/14 09:09:33瀏覽45534|回應2|推薦25 | |
另一個在中國論壇裏被尊爲共識的誤解,技術性比較高些,亦即有關艦載機降落航母時的操作。這應該源自中國沒有通用航空,評論者自己沒有飛行經驗,也聽不懂真正飛行員的解釋與糾正,於是以訛傳訛,到最後大家把沉澱出來的錯誤論述當做真理。 這裏我引用施洋的文章(參見https://www.toutiao.com/i6836148676574839299/)為典型。這倒不是因爲他的水準低,剛好相反,正是因爲他是很少數我願意去讀的軍事類作者之一,而且很少犯錯,所以才值得我花時間評論。 他説:“需要區分正反區的,主要是在飛機落地或者著艦的階段。普通的陸基飛機在著陸時,使用的就是一般的正區操縱:飛行員依靠拉桿或推桿來修正高度…而當速度出現偏差時,飛行員則通過加減油門來進行調整。” “因為艦載機著艦的時候需要有著艦位置的精確…反區操縱的關鍵,在於時刻維持飛機迎角的穩定,而對高度和軌蹟的調整則主要交給油門控制。” 用飛行員的語言來説,他描述的是兩種操作的方式:第一種是“Pitch for altitude,power for speed”,第二種剛好相反,是 “Pitch for speed,power for altitude”。問題在於最終進場(Final Approach)時應該使用哪一種,不是根據陸海差別,而是有其他的考慮。 要解釋這個議題,我必須從Power Curve和Drag Polar講起。首先請注意,如果不考慮左右轉向,飛機的正常飛行有兩個自由度:水平方向的空速(CAS,Calibrated Air Speed),以及垂直方向的升降率(Rate of Ascent/Descent)。而飛行員可用的輸入也是兩個自由度:控制引擎的油門(Power,單位是功率,又叫出力;或者Thrust,推力)和控制俯仰的操縱桿(Pitch)。如果我們限制升降率為零,也就是只考慮穩定平飛狀態,那麽對應著每一個空速值都有一組特定的Power/Pitch設定。暫時忽略Pitch,只看功率(Power)對速度(CAS)的函數,就是Power Curve,如下面第一張圖,這來自一型叫做RV-6A的自建小飛機(Home-built)。
因爲功率P=推力T*速度V,所以一旦有了PR(V)這個函數曲綫,很簡單就可以得到T(V)= PR(V)/V的新函數。但是我們考慮的是穩定平飛,所以推力(Trust)必須剛好跟阻力(Drag)對消,於是D(V) 也等於 PR(V)/V可以接著被畫出來(參見上面的第二張圖),這個函數曲綫圖叫做Drag Polar(雖然嚴格來説,Drag Polar指的是升力對阻力的函數,但是升力與速度的關係簡單固定,所以阻力對速度的函數可以被當作是等價的)。一般因爲螺旋槳引擎的油門所控制的是功率,所以適合用Power Curve來做分析;噴射引擎的油門則決定推力,必須改用Drag Polar。 Power Curve的最低值代表著剋服阻力所消耗的功率最小,而輸出功率與燃料使用率成正比,所以也等於是燃料使用率最低,因此這個空速對應著最長滯空時間(Maximum Endurance)。Drag曲綫的最低點則代表著最小的阻力,阻力乘以距離是消耗掉的能量,既然一箱油所含的總能量是固定值,阻力小對應著距離長,所以這個空速是最大航程速度(Speed of Maximum Range)。如果飛機失去動力,必須緊急迫降,一般應該把速度定為Best Glide Speed(最佳滑翔速度);這裏同樣是在固定的總能量(這個情況下是重力位能)限制下,尋求最大航程,所以同樣要求阻力最小,換句話説,最佳滑翔速度基本就是最大航程空速(必須忽略因引擎工作狀態不同而造成的阻力函數變動)。因爲平飛時,升力必須剛好抵消重力,這是個固定值,所以最小的阻力也對應著最大的升阻比(L/D),這個空速也可以叫做最大升阻比速度。 但是時間也是金錢,最大航程空速一般被認爲在實用上太慢了,於是又定義了所謂的“Optimum Cruise Speed”(最佳巡航速度,又稱Carson’s Speed),這是D(V)/V的最低值,本文用不到,所以讀者無須細究,只要知道它代表著飛機的典型空速,氣動外型主要是圍繞著它來做優化,而且這個速度高於最大航程速度。
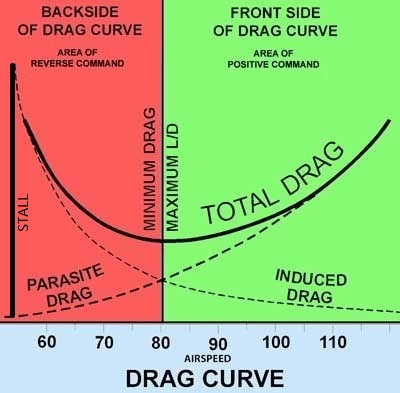
上圖是同樣的阻力對空速函數圖,不過更仔細地把總阻力分解為Induced Drag(誘導阻力)和Parasitic Drag(寄生阻力);前者與速度平方成反比,後者則與速度平方成正比,所以總阻力最小對應著誘導阻力和寄生阻力各半。阻力曲綫在最低值分界綫的兩邊有著不同的斜率:右邊的斜率是正值,叫做“正區”(Area of positive command,或者Front Side of Power/Drag Curve);左邊的斜率是負值,叫做“反區”(Area of Reverse Command, Back Side of Power/Drag Curve),反區的最左邊是失速(Stall)綫。 前面曾提到,不考慮轉彎的話,飛行軌跡有兩個自由度:空速和升降率,而飛行員則依賴改變俯仰的攻角和引擎的油門來控制和修正軌跡。但是飛機對飛控輸入的反應,在正區和反區是不同的。如果飛機處於平飛的穩定態,那麽顯然引擎的推力必須剛好抵消阻力;我們對這個阻力曲綫應該已經很熟悉了。至於攻角,則是沿著橫軸從左到右隨速度增加而遞減的,這也是很直覺的簡單事實。問題在於,當飛行員做出一個小修正時,空速和升降率會如何變化。
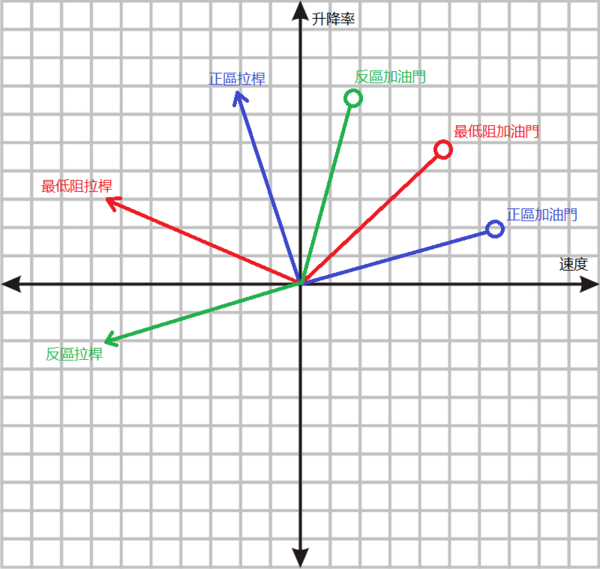
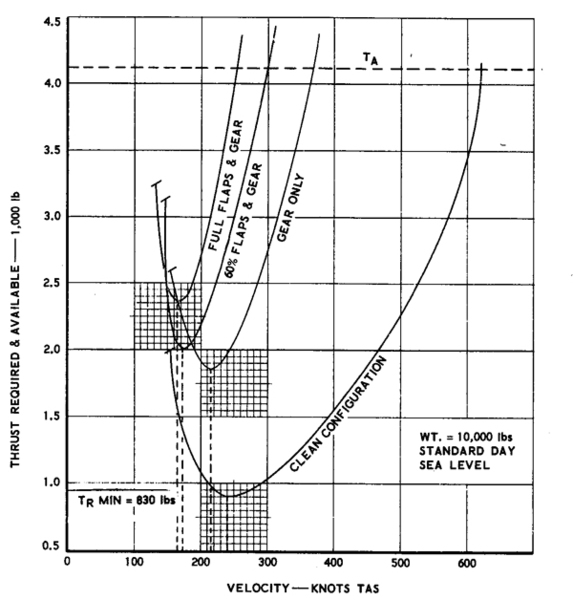
我找不到網絡上現成的教材,只好自己畫一張很簡單的定性示意圖,並不代表實際測量結果,純粹是根據阻力曲綫推論出來的。這裏只詳細討論“最低阻加油門”的案例來示範推理過程:在最低阻空速下,阻力基本不隨速度增減而變動,所以加大油門、提高推力之後,開始加速,對應的平飛所需攻角減小,既然飛行員沒有推桿,實際攻角維持不變,於是有了額外的升力,飛機開始爬升,這個爬升的角度是原攻角和新速度對應的平飛攻角的差,重力有了向後的水平分量,才抵消掉多餘的推力。 上面的推理,考慮了固定升降坡度(Ascent/Descent Slope)的案例,對飛行器來説,這和平飛的唯一差別(To First Order Approximation,到一階近似)在於重力的水平分量,這是對阻力做一個常項修正,等同於整條曲綫做上下平移,並不影響後續分析,所以針對平飛做出的結論,基本也可以應用在固定升降坡度的直飛狀態。剛好Final Approach就是固定坡度(叫做Approach Slope或者Glide Slope,一般是3°,但是如果機場有山陵或高樓圍繞,可以視需要定到更大的角度)、固定速度的直飛,所以也在適用之列。 從上面那張圖還可以簡單看出,在正區油門的效應主要在速度軸向,拉/推桿則主要影響升降率,所以“Pitch for altitude,power for speed”的操作比較自然,反區剛好相反,“Pitch for speed,power for altitude”才是方便的口訣。那麽我們關心的Final Approach,對應的是正區還是反區呢? 以RV-6A爲例,它是螺旋槳飛機,所以正/反區是由最長滯空速度來分割的,這個最長滯空速度是81mph,而進場速度(Landing Approach Speed)是75mph,在反區之内。RV-6A的失速發生在56mph,所以整個反區是在(56,81)的區間;75mph已經很接近後者。然後我們必須考慮這些速度值對應著乾净的氣動外形,只有進場速度是在襟翼和起落架(雖然RV-6A的起落架是固定式的,其他的飛機就可能必須算入起落架的額外阻力)放下的狀態,如果我們考慮這個狀態下的功率曲綫,它必須向左上方移動(參見下圖),所以反區也跟著向左移,其净效應是使得進場速度通常落在正/反區之間的分界綫附近;這其實也是幾乎所有小螺旋槳飛機(例如初級教練機)的共同性質。
讀者可以從稍早那張示意圖看出,在最低阻點附近的拉桿和油門操作,其作用效果也介於正/反區之間,這使得 “Pitch for altitude,power for speed”和“Pitch for speed,power for altitude”都行得通,飛行員可以依主觀偏好來選擇;實際上兩邊都有擁護者。我自己在Boston學習飛行的時候,教練屬於“Pitch for speed,power for altitude”那一派;這也是美國通用航空界佔多數的主流。 但是講到噴射機,尤其是高性能的軍用戰鬥機,那又不太一樣了。以F-18E爲例(這裏的資料來源是美國海軍部的F/A-18E/F飛行員手冊第11部《Performance Parameters》,有興趣的讀者可以到https://info.publicintelligence.net/F18-EF-200.pdf自行下載,下面的數據來自第355、60和362頁),它的最低阻力速度、失速速度和進場速度分別是180、122和136節(取總重45000磅,無外挂,進場時設定半襟翼),即使考慮放下襟翼會使整個阻力曲綫左移,進場速度仍然很扎實地在反區裏。這是噴射機的普遍特徵,也是“Pitch for speed,power for altitude”被認爲是主流技巧的因素之一。 其實艦載機著艦的程序與在陸上機場降落相比,最大的差異在於Pattern(待降航路)和Touch Down(接地瞬間),進場的過程反而是一致的(參見美國海軍航母教練準則T45C,https://www.cnatra.navy.mil/local/docs/pat-pubs/P-816.pdf):不論是坡度、速度、攻角等等參數都沒有差別,所以著艦固然須要反區操作,著陸也一模一樣。 但是施洋很明顯地有來自艦載機飛行員的評論,那他的誤解是怎麽來的呢?我猜想是飛行員描述在陸地機場降落時,可以忽略手冊上的最佳進場速度,直接以正區的高速飛向跑道,然後Flare、減速、再慢慢著陸;要在航母上著艦,可就沒有這個選項。以前在博客上提過,我也曾經應空管中心的要求,開著小Cessna以140節的極速進場,比標準的進場速度高出一倍有餘。 最新一代的戰術飛機,有著先進的電傳飛控,即使在反區深處,也可以簡單地把飛控模式設定為“Constant Descent”,這時操縱桿不直接控制水平尾翼,油門也不直接連接到引擎,而只是對飛控系統指定飛行員想要的下降坡度和速度,由電腦代爲做每秒鐘上百次的微調,使得原本一直被認爲是頂尖難度的航母著艦,一下子變成半自動的過程。連全自動著艦技術,因爲是無人機上艦的前提,也顯然已經被突破;所以下一代的艦載機飛行員,必然會有與以往大不相同的學習經歷。 【後註一,2025/07/18】學了一輩子物理,我原本自以爲對任何物理現象有足夠的直覺,能簡單做出正確的定性判斷,但剛剛看到這篇20年前的老論文(參見《Drop Splashing on a Dry Smooth Surface》),差點驚掉自己的下巴;這裏相關的物理科目是流體動力學,所以放在這篇正文之下和大家分享。 上述論文研究的對象是,足夠高速下落的水滴撞擊固體表面會產生皇冠狀的飛濺;這個現象每個人在下雨天都觀察過無數次,我個人一直以爲是水滴内部的慣性和内聚力在衝擊波作用下的結果,沒想到這些作者用實驗明確證明,飛濺現象來自水滴周圍的空氣:只有空氣密度達到海平面大氣的30%(這個臨界值對應著10公里高空,略高於Mount Everest珠峰,所以不可能在露天的地球表面觀察到,只能用真空室來做實驗)以上,因爲水滴在撞擊後向橫截面的擴展速度超過空氣中的音速,才能產生夠强的超音速激波,反過來擊碎擴展中的水-氣界面,造成許多微小水滴破開飛濺。We are never too old to learn new concept. |
|
| ( 不分類|不分類 ) |