字體:小 中 大
字體:小 中 大 |
|
|
|
| 2009/03/26 09:44:25瀏覽3509|回應3|推薦1 | |
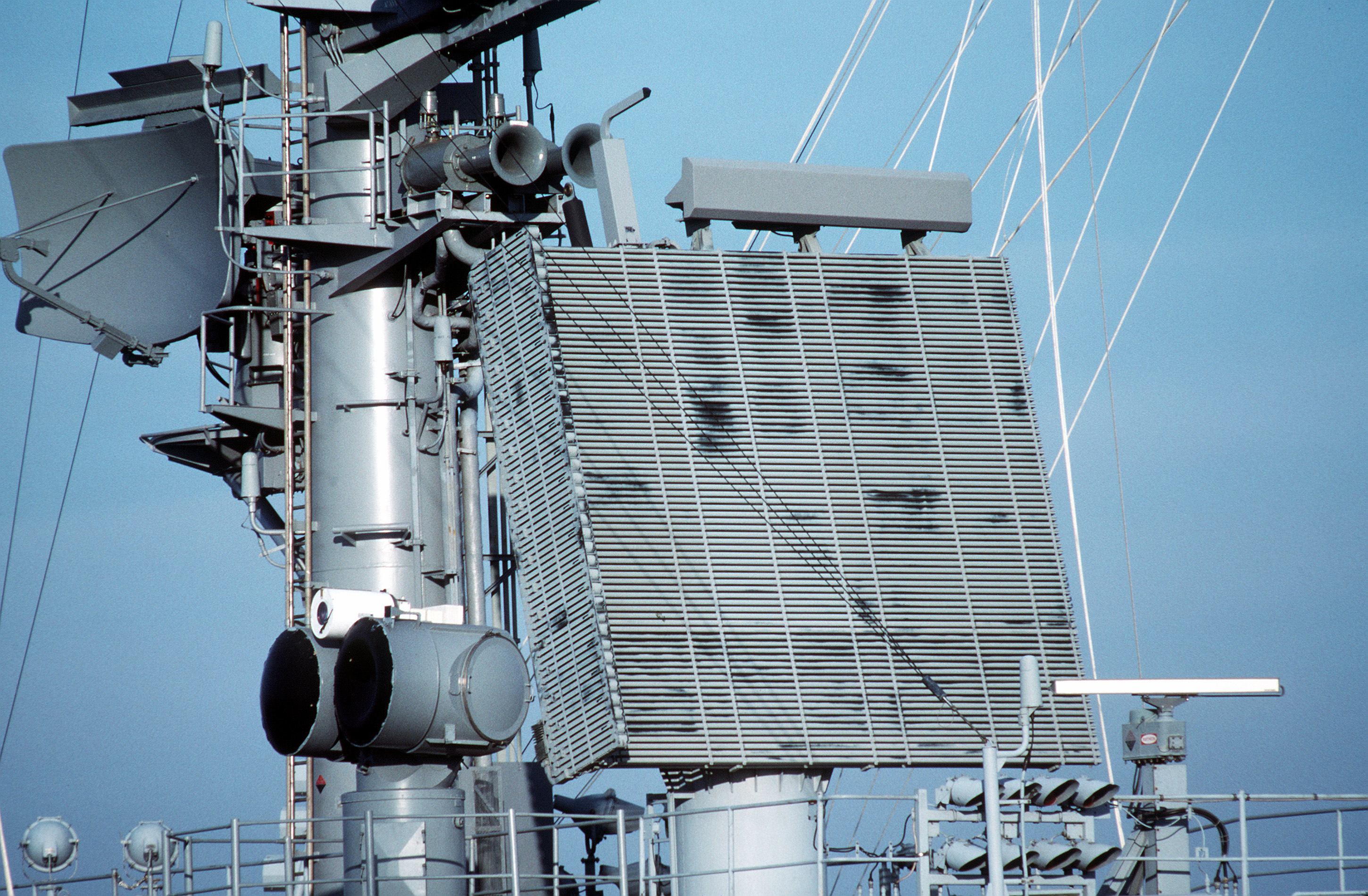
承蒙假圖天國的版主的好意,寫了一篇關於三維頻率掃描雷達的文章來討論,當初在留言的時候因為篇幅的關係,寫的不好,使得版主有點誤會。因此在這裡解釋一下當初留言當中對於相位陣列雷達與SPS-48之間差異的一些說法。 假圖天空的版主寫了兩篇相當有趣,關於艦艇區域防空與神盾作戰系統的文章,在第二篇當中提到神盾系統的SPY-1相位陣列雷達,以及在美國軍艦上常見的SPS-48三維對空搜索雷達,認為兩種雷達都使用相位陣列的技術。我在留言中提到SPS-48是以不同頻率的九條波束作為對空搜索的方式,與相位陣列不同。因為寫的很短,版主可能以為我是在強調SPS-48有旋轉基座,而SPY-1沒有。不過我想要強調的是他們的天線的作業型態不相同,只是和旋轉與否沒有關係。 下面是SPS-48的一張照片:
從這個圖上可以看到天線上面有一條一條的東西,這些就是線狀陣列,SPS-48C以後有95條陣列,這些陣列負責送出和接收訊號。 下面這個圖是神盾作戰系統使用的SPY-1雷達:
一時找不到同樣細部的照片來顯示陣列的差異,只好請大家湊合著看。SPY-1的陣列數目超過4000個,重量也很高。 我這邊沒有假圖天空的正妹照片,所以請各位多忍耐一下看完下面的解釋,再去那邊看正妹。 回到這一篇的重點。先簡單的解釋一下相位陣列雷達天線工作的情況。相位陣列雷達顧名思義,是以改變多個波束的相位,然後利用這些波束的相位差別,使得整合起來的波束能夠改變發射的方向。這個改變的過程是以電腦作出高速計算,讓每一個陣列產生需要的相位以達到希望改變的方向。這種作業方式在固定或者是旋轉天線上都是一樣的。這裡暫時不討論與解釋主動和被動相位陣列的差異。我在本部落格有關俄國戰機雷達的文章中有提到,各位可以參考。 SPS-48為了達到可以同時在三維掃描,不需要另外搭配一個專門的測高雷達,而且在早期電子技術還沒有那麼穩定的階段,他採用的是一種折衷的方式:他的天線會同時發射九道不同頻率的波束,也就是說,假如以手電筒來作一個簡單的比喻,他就像是把九個光線顏色不同的手電筒垂直擺起來,同時打開,每個顏色的光線涵蓋大約5度的範圍,因此整個天線加起來可以同時在垂直面上涵蓋45度。 因為每個波束的頻率(光線的顏色)不同,因此接收的時候只要判斷是那一個頻率的反射波(那一個光線的顏色反射回來),透過計算就能夠知道該目標相對於天線的垂直角度,換算之後就可以知道目標的高度了。因為這九到波束的頻率不同,所以在接收的時候也可以避開無從判斷的問題了。 如果也是以手電筒來看相位陣列雷達的話,每一個陣列就像是一個很小的燈泡,但是所有的燈泡都是同樣顏色的光線,這些小燈泡發射的光線形成一條大光線(波束),不像是SPS-48有頻率(光線顏色)的差別。 這個就是原先我要表達關於這兩種雷達的一些差別。如果有任何錯誤,還請各位指正與指教。謝謝。 |
|
| ( 時事評論|國防軍事 ) |