字體:小 中 大
字體:小 中 大 |
|
|
|
| 2021/01/07 05:14:56瀏覽847|回應0|推薦6 | |
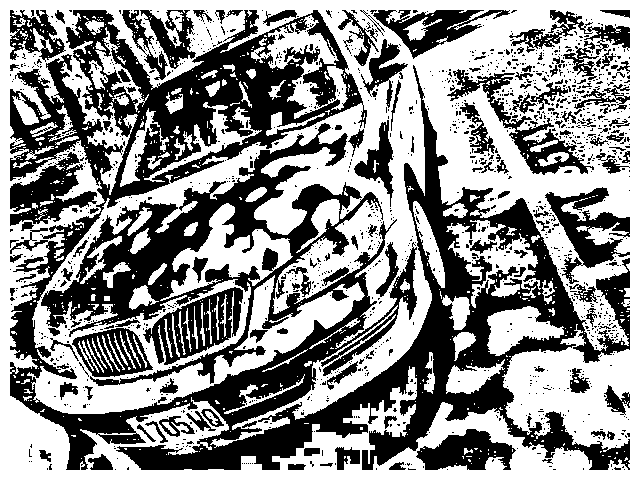
這個辨識成功的案例夠誇張吧?車牌辨識廠商都愛吹牛搞神祕,別的廠商如果可以做到,不會跟你解釋是如何辨識的!一定是藉此誇耀他們是用甚麼神奇的AI科技含糊其詞。就像多數電腦很厲害的人一樣,讓我這個原本是資訊科技門外漢的人,自學的學習過程中充滿了坎坷,甚至是屢屢被嘲笑霸凌! 如果我始終都做不到他們能做的事情,那就沒戲了!現在我行了,我就是很想清楚的告訴大家這是怎麼回事?任何困難的事情,終究都是有清晰合理過程的!我能辨識這麼困難的車牌的原因,並不是我用了(或發明了)甚麼特殊的AI演算法,而是我堅持使用一般人的腦袋都會思考的方式!就像所有人面對困難一樣,過程絕對不是簡單平順的,重點是我怎麼面對挫敗,想出下一步努力的方向! 首先我當然是依照一般人的思考方式,認為車牌應該是有明顯對比的目標,所以直接排除了對比度很低的區域,所以我會實際執行辨識的灰階圖是長這個樣子的!空白區域就是我的程式認定對比度太低,不可能有車牌的區域,實際上很黯淡的車牌就被我忽視排除了!
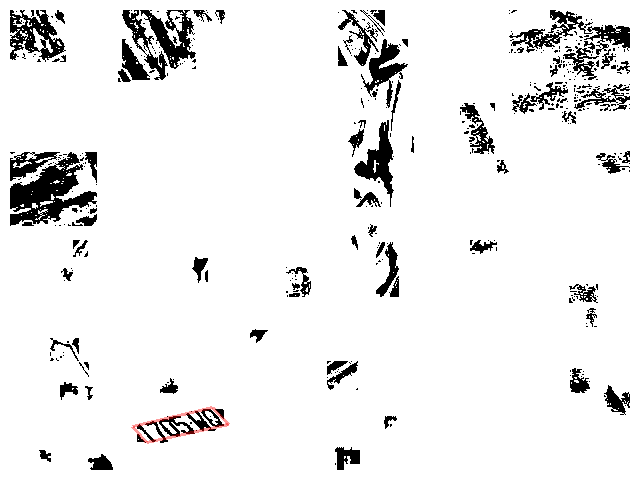
當然這樣就會讓我耗費不少時間做了無效的搜尋,像是山難搜救人員找錯了受難者可能藏身的山谷一樣!找遍我以為可能有車牌的區域,卻一無所獲,怎麼辦?如果是我知道可能根本沒有受難者,或搜救資源有限,那就只能收手了!但如果要堅持下去呢?那就是擴大搜救範圍到原本以為「不太可能」的區域了! 所以我放棄了所有篩選條件門檻,任何有對比度的區域目標都地毯式搜索,這是可以作到但是很花費時間的,正常的車牌辨識軟體是不可能這麼運作的!因為那就會讓車牌辨識超慢的,一般使用者一定會受不了!但是當我面對一張影像找不到車牌時,時間沒壓力我就可以這麼做!
這是堅持搜尋所有區域都盡量做出二值化的結果,看到了嗎?車牌雖然黯淡但還是有足夠對比度的,只要你不放棄所有的可能性。經過目標擷取與篩選,車牌目標就出現了!
後面的故事發展在此當然就不重要了!跟原本清晰的車牌辨識是完全一樣的。重點是:我不可能一開始就這麼鉅細靡遺的考慮到車牌可能是如此黯淡陰暗的狀況,就像我不可能提供所有培養頂尖科學家的資源給所有的學生,如果真正最後可以拿諾貝爾獎的天才是在山區偏鄉的野孩子呢? 這種合理的搜尋辨識過程一定是要步步逼近,不可能一開始就投入所有資源地毯式搜索的!這就是ML與CNN影像辨識概念的盲點!為了效率與可能的誤判,影像辨識真的很像山難搜救,必須善用資源先找最可能的區域目標,95%的機率你用極少的資源就可以達到目的,只有極端狀況你才需要使上全力。 所以我的軟體才能又快速又能準確辨識困難的案例,其實這兩者是互斥的!但是ML或CNN的概念中是沒有這種思維的!總以為只要丟入所有的食材,大鍋炒一下就甚麼菜都會自動出現,還很好吃了!他們真的太天真了!資料多與齊全與否並不是所有的重點,如何運用的過程還有很多學問,他們是完全沒考慮到的!因為對他們來說:資料本身就是一切,物理現象與過程成因都是不重要的! 那我最近宣稱引進ML技術到我的辨識核心是怎麼回事呢?其實只是用在局部區域的二值化門檻決策,譬如上面這麼黯淡的車牌字元,二值化門檻稍微不夠精準就會糊成一團了!此時將周邊區塊的資訊做成機率分布準確預測這個關鍵區域的二值化門檻就極為重要,我也才能將那麼模糊的車牌字元目標切割清楚。至於將此概念用在全圖的判斷決策呢?那是完全不合理的,我想都不會想這麼作的!這就是我批評ML與CNN的地方了! |
|
| ( 心情隨筆|工作職場 ) |