字體:小 中 大
字體:小 中 大 |
|
|
|
| 2020/02/21 12:21:49瀏覽1657|回應0|推薦7 | |
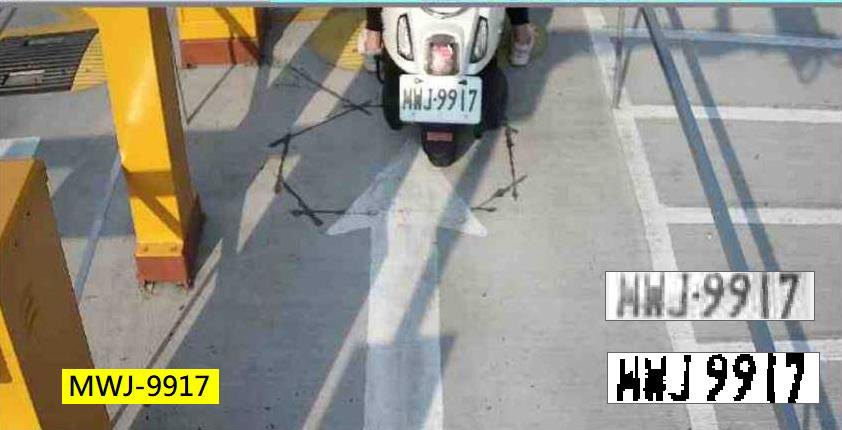
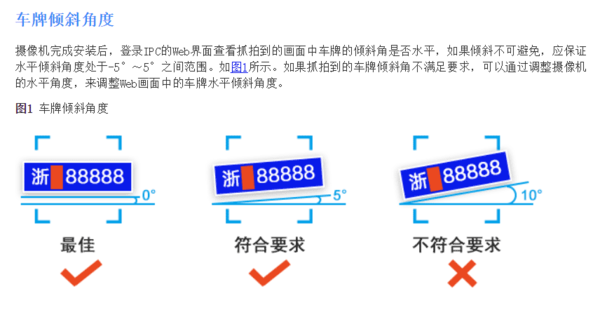
這是位於屏東縣某火車站的一個機車收費停車場,他們採用了我的動態車牌辨識軟體,目前這樣以汽車的規格作車牌辨識收費的機車停車場應該還很少,但之前我的軟體就作過校園機車停車場出入口的動態辨識,還作了兩間科大!而且他們是不會停車等柵欄的,就是直接衝過辨識區,辨識難度比這個案例還高!但是辨識率要求「只要」95%,還難不倒我!這次是用在會停車等開閘門的收費停車場,如果辨識正確率沒到98%以上就會不好意思了! 一般來說,機車車牌的辨識比汽車困難很多!主要原因是機車車牌不但較小,也比較容易髒污磨損,而且機車轉彎或停車時可以傾斜到二三十度,一般的車牌辨識系統,傾斜十度以上就會開始失靈了!連大陸的華為這麼大的公司賣的車牌辨識系統都說不能超過十度!這種系統當然不適合用來辨識機車!
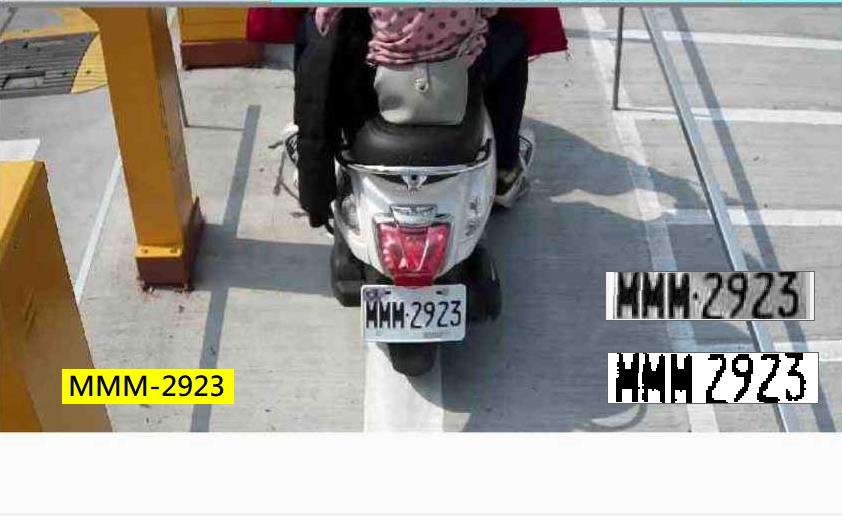
而且機車停車場多數都在室外,不像汽車停車場多數都在室內,自然陽光造成的光影也是必須克服的問題。還有一個隱形的小問題,也出現在前面那張圖上,就是台灣機車新的七碼車牌大多以M開頭,如果影像稍微不清楚,七碼車牌中的M與W是很容易交叉誤認的!偏偏機車車牌好多這種M與W肩並肩的狀況!看看下面幾張吧!用人眼看也需要想一下吧?
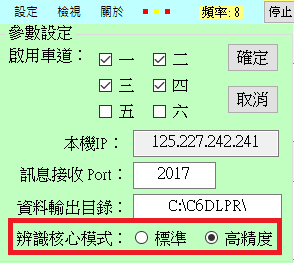
前兩天他們回饋了九張這個場地辨識錯誤的照片給我!上面就是其中的幾張。看看它們的長相,是不是很像車牌辨識的考試?光影、貼紙、加上車牌邊角彎曲,大家可以馬上體會到,為什麼現在機車車牌辨識的場域還這麼少?要保證高辨識率是很難的!辨識核心必須比一般辨識汽車的版本聰明一點! 我其實沒有針對這些辨識錯的照片作深入的研究,因為他們買的是動態辨識軟體,之前使用於一般的汽車停車場,為了考慮辨識速度與電腦負荷,要作四到六車道的同步辨識,而且辨識環境都還不錯,所以我的辨識核心是比較中量級的!並不是我的產品中辨識能力最強的版本! 一次講清楚!我的車牌辨識核心有三種等級!最快速最輕量級的,是用於道路環境,也就是路邊監視或車載車牌辨識軟體,可以用最快的速度作大範圍的全景多車辨識;中等辨識能力的就是停車場用的辨識核心,侷限於一張影像辨識一個車牌,車輛目標有速度,但是不會很快;最強的辨識核心則用於辨識手拍的,路邊開單的靜態影像! 道路與停車場會用相對「比較弱」一點的核心,原因不只是追求速度,也因為動態辨識時,車牌的距離角度會一直改變,某個角度即使有點難辨識,下一刻的角度或許就變好了!所以對某個單一車牌的辨識成功率影響不大!但是碰到只有單張的影像,如果辨識不出車牌就沒有下次機會了!所以靜態辨識用的核心必須無所不用其極地把所有我會的演算法通通用上,速度當然會慢一點! 因此上面幾張影像都是用中量級的停車場專用核心會辨識錯誤,但是改用辨識能力最好的核心就通通過關了!我因此將提供他們的停車場軟體也改版了,可以選擇使用最強但是速度稍慢的辨識核心!不另收費哦!很大方吧?我相信接下來就不會再有太多這些辨識邊緣的錯誤了!
知道了齁!要我作機車車牌的辨識軟體也是OK的!相信這種場域有了辨識率夠高的軟體,也會越來越多的!欣賞一下下面的影片就會知道辨識核心版本是有差的! |
|
| ( 心情隨筆|工作職場 ) |