字體:小 中 大
字體:小 中 大 |
|
|
|
| 2012/08/15 13:48:18瀏覽36013|回應1|推薦0 | |
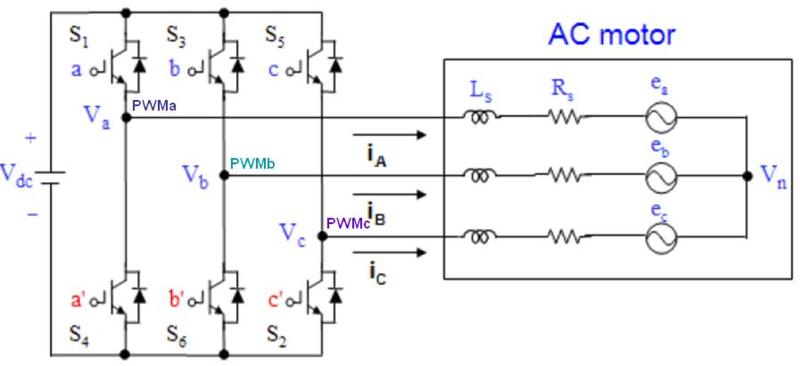
SVPWM工作原理 SVPWM (Space Vector PWM) 的工作原理是利用三相PWM Inverter的基本電壓向量來合成所欲產生之定子電流,此合成電流在定子線圈上產生旋轉之定子磁通向量與轉子磁通相互作用產生扭矩,使馬達得以旋轉。SVPWM即以合成之定子磁通向量來決定六個功率開關元件的切換時刻,因此命名為空間向量脈寬調變。 這種方法藉著控制電壓向量使得馬達氣隙旋轉磁通向量軌跡逼近一個理想的圓且有最小的磁通漣波,其扭矩漣波 (torque ripple) 最低,因此在開路控制的情況下,轉速漣波亦最小。 圖(三). 為馬達驅動電路的六個功率開關元件,因為空間向量脈寬調變開關控制定義為上下互補,所以實際上可視為兩種開關 (上開關on + 下開關off,或是上開關off + 下開關on ),因此六個功率開關元件可產生總共八種開關狀態組合, 其相對應的8個基本電壓向量如圖(四)所示。 圖(三). 馬達功率開關驅動電路
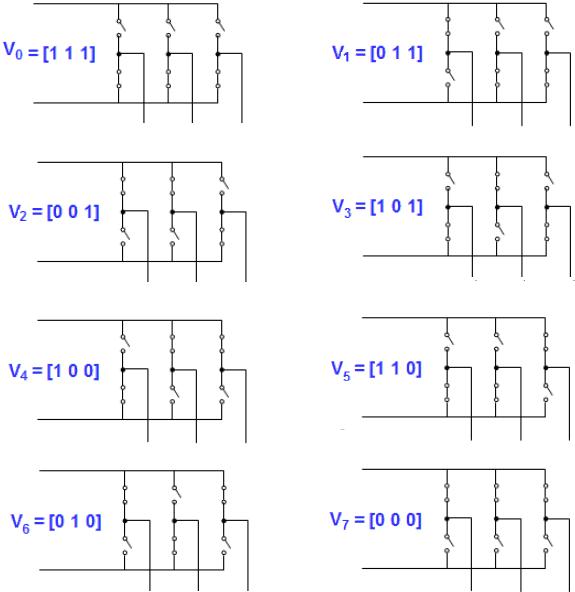
圖(四). 馬達驅動電路的六個功率開關狀態組合
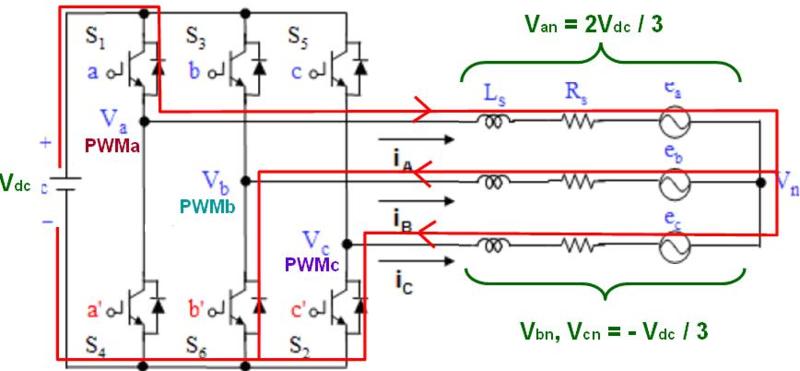
在這8個基本向量中,V0 與V7 屬於零向量,其餘6個向量V1 ~ V6 為彼此獨立之驅動向量,也就成為定子電壓向量合成的基本向量,而零向量則用來調整責任比,以及做為當象限變換時的轉移向量 (transition vector)。 定子的電流是由開關動作的電壓驅動產生,所以定子電流均可由 V1 ~ V6 中的電壓向量所合成,也就是說連續變化之各種電流波形皆可由電壓向量所合成,但各電壓向量所代表的驅動電壓大小為何? 而且它是如何合成定子電流? 首先在圖(五)我們以電壓向量V1[0,1,1]迴路來做分析驅動電壓大小,其中,V1[0,1,1] 代表三相馬達驅動電路作用於a相線圈的電壓向量, 而a相線圈藉由此電壓向量驅動作用因而產生a相電流, 而a相電流亦可為a相線圈的相電壓差所產生,所以我們可以理解a相的電壓向量可以直接對應於a相線圈的相電壓差,是故只要我們求得a相之相電壓大小,便可以推得電壓向量V1[0,1,1]的作用大小。 我們假設三相馬達Y線圈各相阻抗參數相等,則a相線圈的相電壓值可以經由簡單的計算得到為2Vdc /3,此2Vdc /3的電壓值便是V1[0,1,1]作用於a相線圈的相電壓,a相線圈所產生的電流大小便是由相電壓值與一時間變量相互作用下所產生的數值。同理類推,b相與c相驅動迴路所產生b相與c相之相電壓值皆為2Vdc /3,所以可以推得空間向量脈寬調變之電壓向量V1 ~ V6的驅動電壓值皆為2Vdc /3。 圖(五). 三相馬達之電壓向量V1[0,1,1]驅動迴路
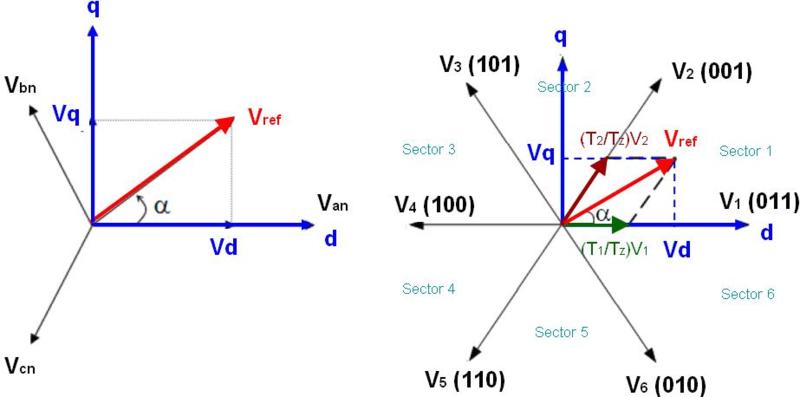
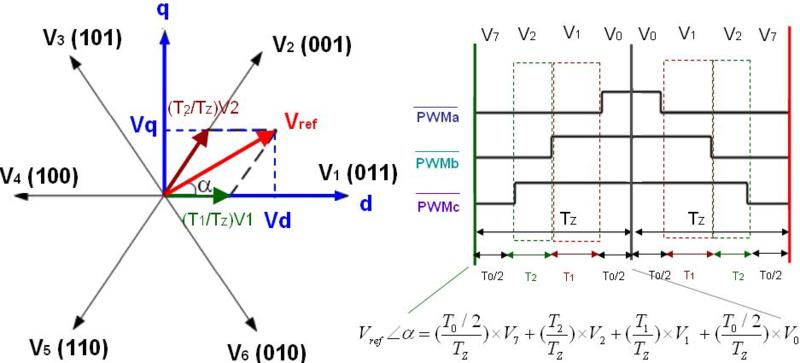
三相電壓座標軸可以由互成120度相位的相電壓分量Van Vbn與Vcn所組成, 其任一時間的電壓向量Vref可以由Van Vbn與Vcn依時間變化分量所合成,為簡化觀察座標起見,我們通常會將三相電壓軸映射至90度相位的d-q座標軸來看,如圖(六).左圖所示, 其電壓向量Vref亦可經由d-q軸依時間變化的分量Vd 與Vq所合成,接著我們可以把空間向量脈寬調變之電壓向量V1 ~ V6與d-q軸分量座標做結合, 這樣我們可以比較清楚了解到電壓向量Vref,也可以經由空間向量V1 ~ V6的作用時間求得,圖(六)的右圖是V1 ~ V6空間向量位置圖,其向量的分佈位置依據如下: 其中,V1、 V3、 V5分別供給a、b、c相位之電壓,所以分別位於a、b、c相同相位的位置,而V2、 V4、 V6以相鄰向量變化一個開關為要領,各別置入其它的空間向量之間而得到整體分佈位置。 圖(六). 空間向量脈寬調變之電壓向量分佈圖
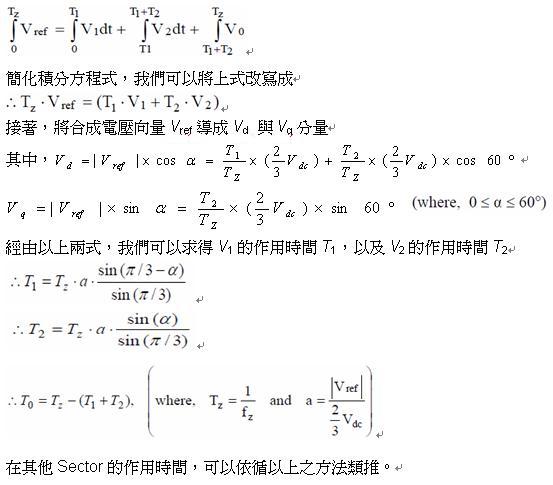
如前所述電壓向量Vref可以經由空間向量V1 ~ V6的作用時間求得,我們已經知道各電壓向量所代表的電壓值大小,為求得合成電壓向量Vref,那麼電壓向量作用時間需要多久? 為得到作用時間我們推導如下之數學式: 首先,我們假設合成電壓向量Vref正好位於圖(六)右圖的Sector 1中,在Sector 1需由V1 與V2向量來合成電壓向量Vref,由此我們可以列出合成電壓向量Vref方程式。 式中V1的作用時間為T1, V2的作用時間為T2,合成電壓向量Vref整體作用時間為TZ,其中,V0 或V7 屬於零向量,如前所述是用來調整責任比之用。
圖(七). 空間向量脈寬調變之PWM運作狀態圖
|
|
| ( 知識學習|其他 ) |