字體:小 中 大
字體:小 中 大 |
|
|
|
| 2012/08/15 18:23:17瀏覽8064|回應0|推薦0 | |
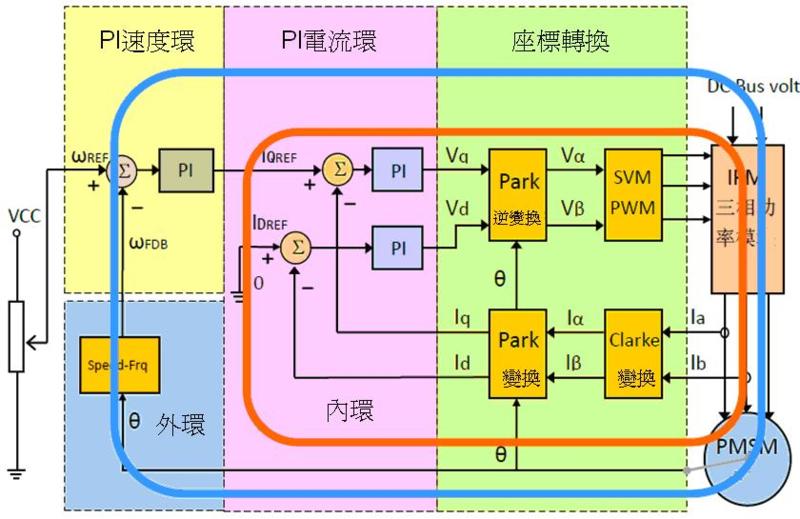
PI控制原理 在基本的FOC演算法中使用到了3個PI 控制器(角度估算中還會使用到PI),如圖(三十一)所示,1個PI速度環做為控制轉速,2個PI電流環以d軸PI控制轉子磁通和q軸PI控制轉子轉矩,相對來說,由於電機的轉子具有慣量,當控制電壓發生改變時,電機電流的變化比轉速的變化更快一些,所以在向量控制時,可以將電流環作為內環,速度環作為外環。 圖(三十一) PI控制器速度環與電流環
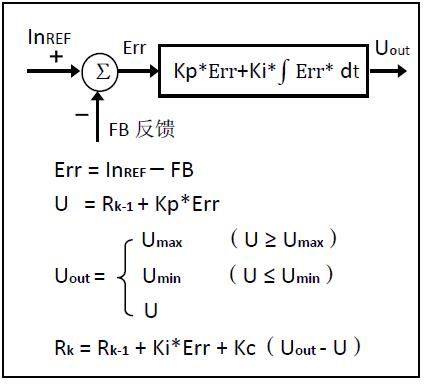
PI 控制器的比例 P項,是由誤差信號 Err乘以一個比例增益因數KP 形成,用以控制減小總誤差,但是,P項的影響會隨著誤差趨近於零而減小,導致系統始終存在一個微小的時間取樣偏移誤差。 P I 控制器的積分項 I 用來消除時間取樣偏移誤差,所以 I 項對誤差信號進行連續的積分。隨著時間的推移,避免微小的時間取樣誤差被累積增大,再將誤差信號與積分增益Ki 相乘(Ki x Err)成為 I 項輸出。 每個PI 控制器內包含3個增益參數,參考圖(三十二),分別是比例增益KP,積分增益Ki 以及積分飽和修正係數Kc (當Uout ¹U,發生於U³Umax,U£ Umin 狀況下做修正) ,在初次對PI 參數進行調節時可以先將Ki 和Kc 設為 0,並逐漸增大KP,當調節到系統能夠很好的響應給定的標量而又不產生超調振盪時,說明KP 調節到位, 當然,KP 的設定是一個範圍,即可大一點,也可小一點,但具體要與實際要求反應狀況結合。較大的KP 設定值反應誤差控制精度較高,但對系統回饋量SNR信噪比的要求也會較高,較小的KP 設定值控制反應誤差控制精度較低(偏差較大),但控制穩定性較好。設定好KP 後,再來調節Ki,逐漸增大Ki 使系統達到最平滑的控制效果,由於Ki 是積分項增益,即使是較小的Ki 值也能隨著時間積分達到理想的控制效果,但如果Ki 設定得較大,則會抵消P項的作用,使回應誤差控制鈍化且回應速度變慢,甚至會使系統在設定值附近發生振盪,通常對於Kc 積分飽和修正係數的設定經驗,只需設置成Kc = Ki /KP 即可。 圖(三十二). P I控制器控制演算
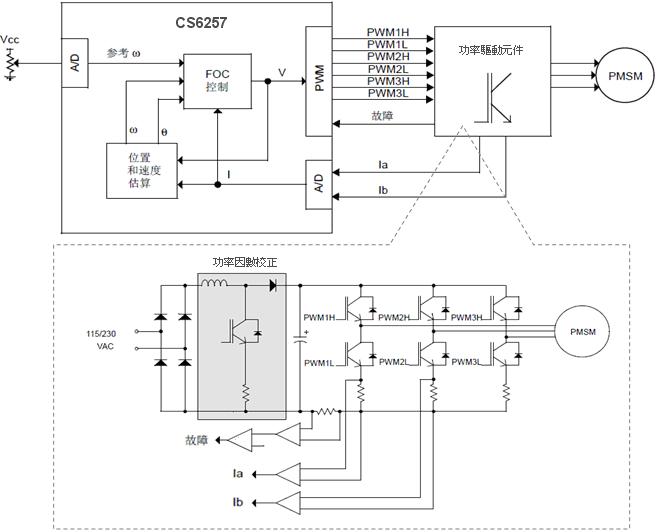
Err : 回饋量與預定量的誤差 Rk : 第k次積分項輸出量 Uout : 控制量輸出 KP : 比例項增益 Ki : 積分項增益 Kc : 積分飽和修正係數 基於32-bit MCU的控制的考量,在於處理複雜的FOC演算可以獲得較佳的控制特性,所以通常設計以32-bit MCU,做為FOC的控制核心,圖(三十三) 展示32-bit MCU晶片與驅動系統的連接圖,初學者可以藉由此圖示對控制晶片與驅動系統有一個完整的控制概念連結。對一般控制系統而言,驅動平臺設計需講求通用性與實用性,才能更便利地發展DEMO系統並因應客戶各類產品的設計需求,以無感測器FOC控制系統設計而言,一般的電器應用可以得到較佳的控制效能優勢與低價競爭優勢,所以已經有越來越多的消費性產品,選擇以FOC做為應用技術,為因應市場逐漸擴大的需求, 提供通用且實用的FOC驅動平台的必要性逐漸升高,它不僅讓我們節省一些不必要的系統重製時間與人力資源浪費,而且各類應用的參數需考量硬體設計架構之彈性,才能獲至更快速F/W調校時間以滿足不同客戶的schedule需求。 圖(三十三). 32-bit MCU晶片與驅動系統連接圖
|
|
| ( 知識學習|其他 ) |