字體:小 中 大
字體:小 中 大 |
|
|
|
| 2026/05/16 01:52:55瀏覽1124|回應0|推薦18 | |
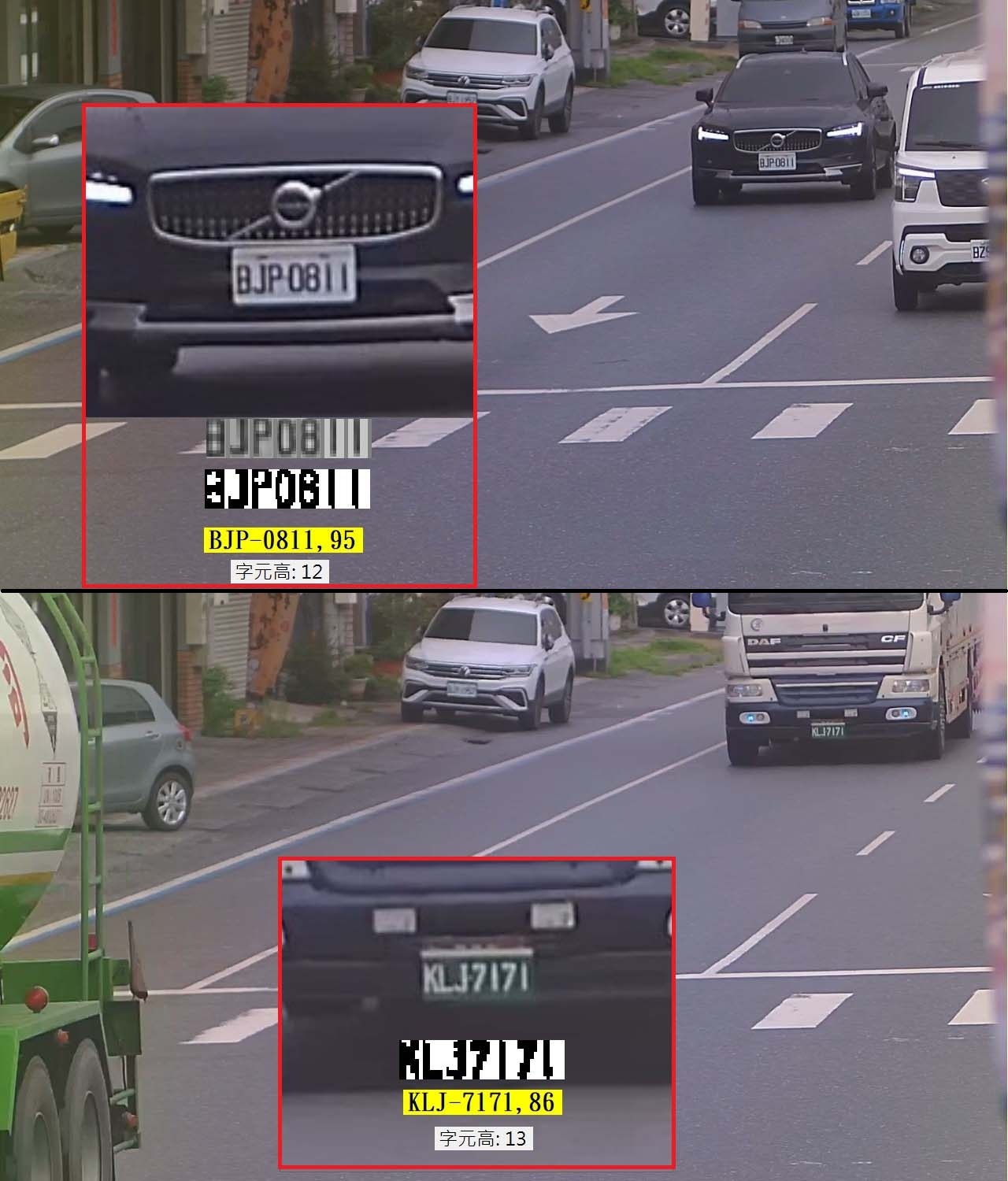
這是用我的車載車牌辨識軟體,從某個路口監視器的即時影像中抓到的車牌影像!重點是:在車牌距離還相當遠的位置,車牌字元只有十二三個畫素高時,我的車牌辨識核心就已經可以正確的辨識到車牌了!即使沒有縮圖,這麼小的字元一般人也很難看清楚的!所以我才要用程式介面放大給大家看嘛! 做過影像辨識的人都知道,數位影像中的目標越小就表示內容資訊越少,即使你可以用程式無限放大,也只是看到一堆馬賽克而已!很多警匪影集中,FBI的軟體可以從街景影像中將遠處模糊的車牌不斷放大就能看到清晰的車牌?那是騙人的! 因為監視街景用的攝影機不可能有那麼高的解析度,每支路口監視器都要用幾千萬畫素的攝影機?那太燒錢了!即使真有極高的解析度,也會因為景深太大,不可能畫面中任何距離的目標焦距都很準,目標距離如果不在自動對焦的理想範圍,即使畫素足夠多放大之後也是像近視眼看東西一樣很模糊的!這是物理上無法改變的事實,就像你不可能超越光速一樣! 所以堅持要辨識畫面中較小(較遠)的目標時,正確率當然會比較低的!那為什麼我的這種軟體還是堅持要辨識這麼小的目標呢?我大可以限制只辨識較大的目標的!譬如只辨識字元高20畫素以上的目標,辨識率就一定非常高了!就像你招募籃球員時限制身高必須超過180,組成的球隊當然先天就有優勢!但是如果你那麼挑剔,應該根本找不到夠多選手成軍!要讓身高不高的人也能把籃球打得很強很好,那才是更大的挑戰! 我必須堅持的原因,是在動態街景中每個車牌未必都可以跑到近距離好辨識的甜蜜區,有些車遠遠的就轉彎到看不見車牌了!有些車好不容易靠近攝影機了,卻剛好被其他車輛遮蔽住車牌了!想在這種複雜街景中盡量多辨識到更多車牌,你就不能挑食!不但小目標要辨識,歪斜度很高的車牌也要儘量辨識! 所以鉅細靡遺不放棄任何可能辨識成功的車牌目標,就是我的街景動態車牌辨識軟體能辨識到更多車牌的前提!也就是前文提到的,客戶說我的軟體很「積極」的具體原因了!但光是積極努力還是不夠的,如果勉強辨識的結果錯誤率太高,那只是增加垃圾資訊而已!徒增使用者的無謂困擾!我必須讓難辨識的目標正確率也盡量提高! 所以我的日常工作就是一張一張仔細研究這些在模糊邊緣的影像!微調所有辨識過程的任何參數,讓我的辨識流程可以得到最大辨識率的結果!這個過程就很像機器學習了!但我是直接用我的科學邏輯去精準學習與控制這個過程的!不是像機器學習只是交給電腦去胡搞瞎搞!最終產出軟體的正確率與可靠性當然不可同日而語!但是當然需要更高深的影像辨識專業知識! 所以影像辨識軟體要表現得好是沒有甚麼運氣或秘技的!必須真的可以盡量正確的處理所有的可用資訊!我和機器學習團隊的差異只是他們依賴電腦從資料中統計調整出最大成功率的SOP!我則是用我的腦袋,專家級的知識,一步一腳印的將這個精密儀器逐步設計與實作出來! 所以不必羨慕我目前的軟體很厲害,你很難付出跟我一樣多的血汗的!十年以上的焚膏繼晷寒窗苦讀才熬出這一點點成就,用機器學習要追近我的成就容易多了!但是要超越我的專家系統呢?理論上就不可能的!你只能無奈接受機器學習永遠不如專家系統的必敗命運!我的AI影像辨識就是注定會永遠領先機器學習的AI!完全沒得商量! |
|
| ( 心情隨筆|工作職場 ) |