字體:小 中 大
字體:小 中 大 |
|
|
|
| 2008/06/07 21:06:30瀏覽1053|回應0|推薦5 | |
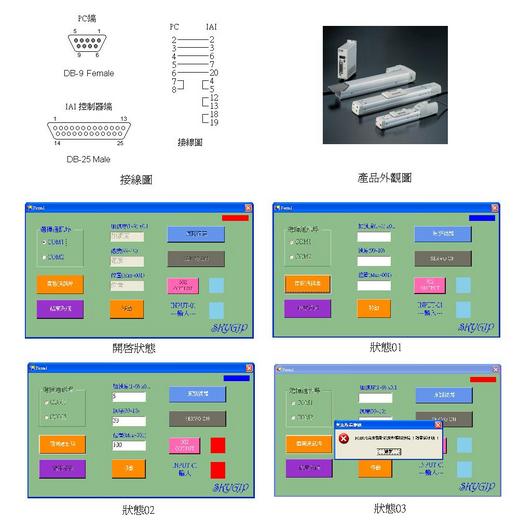
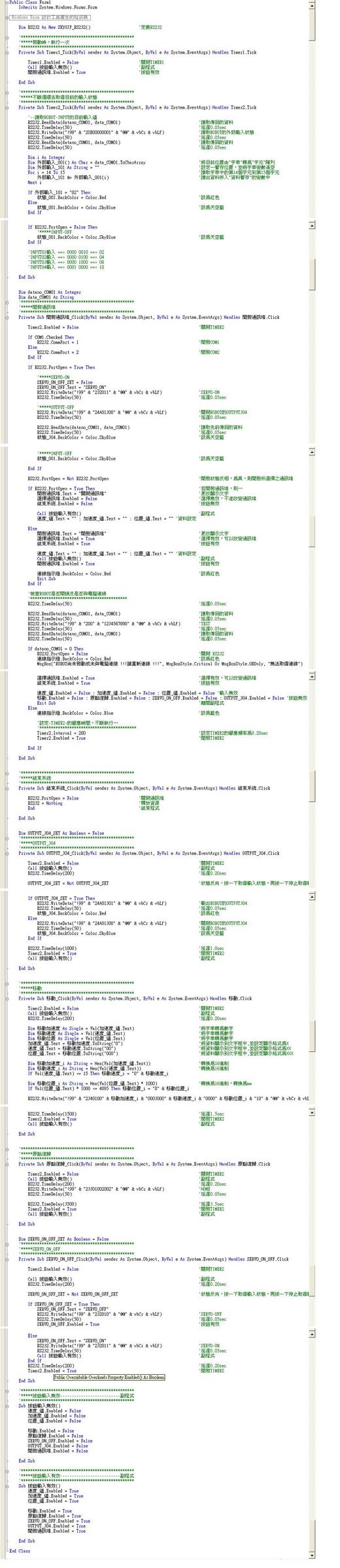
RCP2是一款由步進馬達驅動的ROBOT… 配合P-SEL的控制器來進行ROBOT的控制… 功能: 位置移動控制、原點復歸、SERVO ON/OFF、 INPUT及OUTPUT的控制。 說明: 1. 選擇你所連接的RS232埠… 2. 按下開啟通訊埠…進入連線狀態。 當連線成功時,右上角的指示燈會變為藍色。 3. 輸入參數設定,控下"移動"即可移動至相關位置。 4. 按下 "原點復歸"能使ROBOT進行原點復歸的動作。 5. 按下 "SERVO ON"能使ROBOT為自由狀態。 按下 "SERVO OFF"能使ROBOT為激磁狀態。 6. 按下 "304 OUTPUT"使接點304為ON的狀態。 7. 當"INPUT 01"有輸入時,會亮紅燈。 8. 關閉通訊埠…結束系統…離開程式… SKYGJP 08/06/07 參考網站: http://www.alteks.com.tw/iai-pdf/RCP2.pdf 檔案下載: http://www.badongo.com/file/9771704 程式分享:
|
|
| ( 知識學習|隨堂筆記 ) |