字體:小 中 大
字體:小 中 大 |
|
|
|
| 2019/09/26 05:44:28瀏覽1285|回應0|推薦14 | |
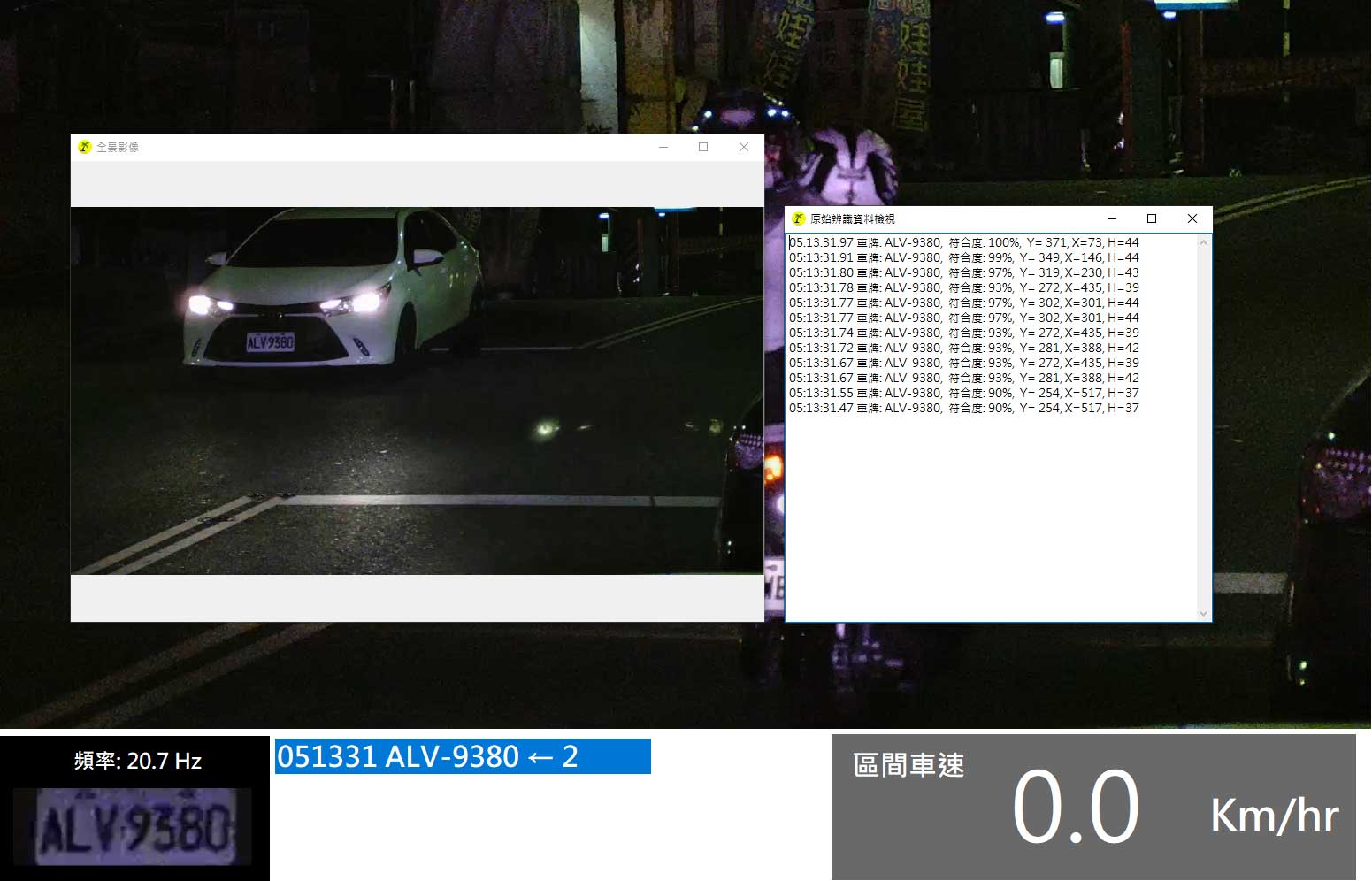
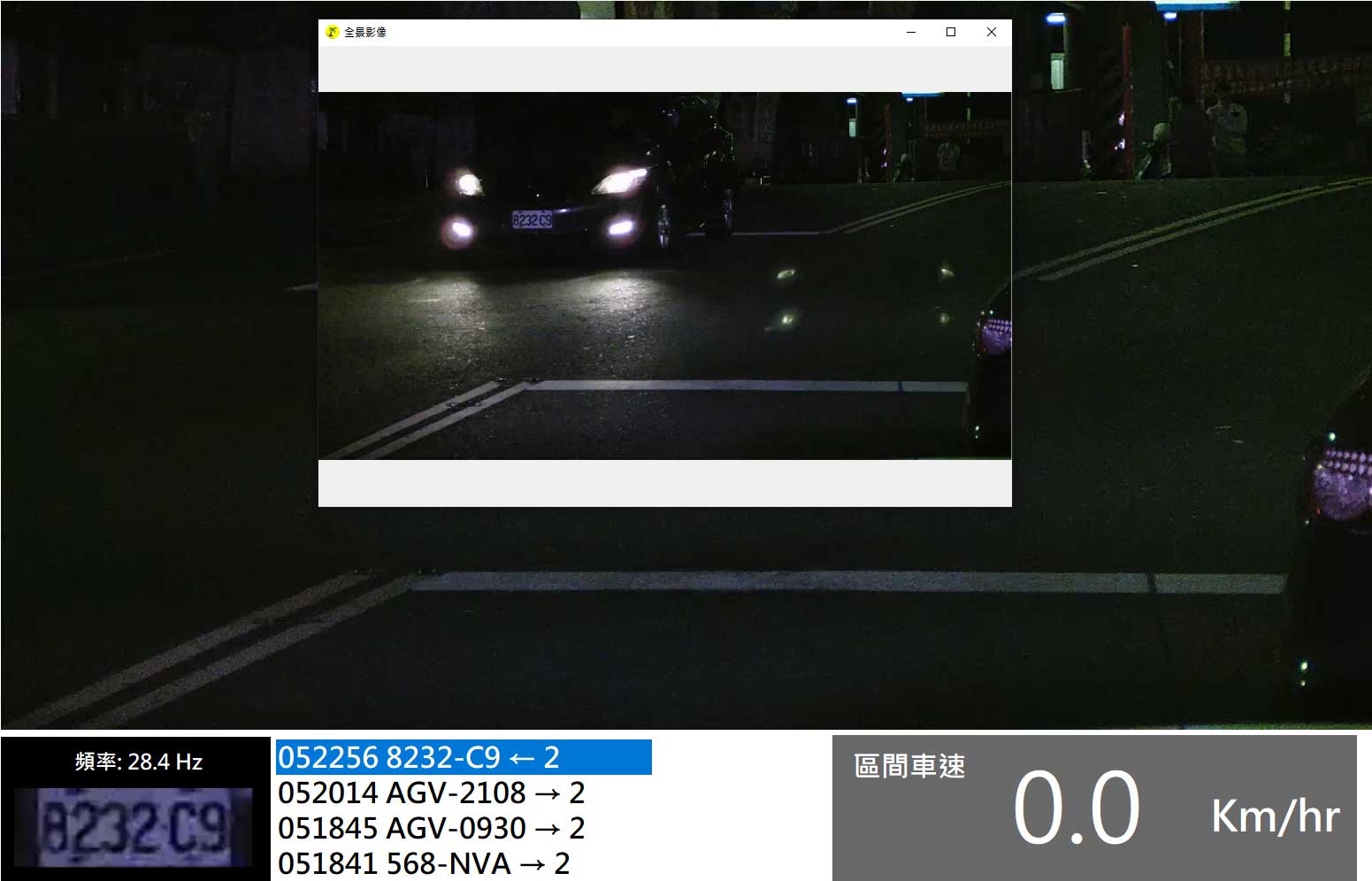
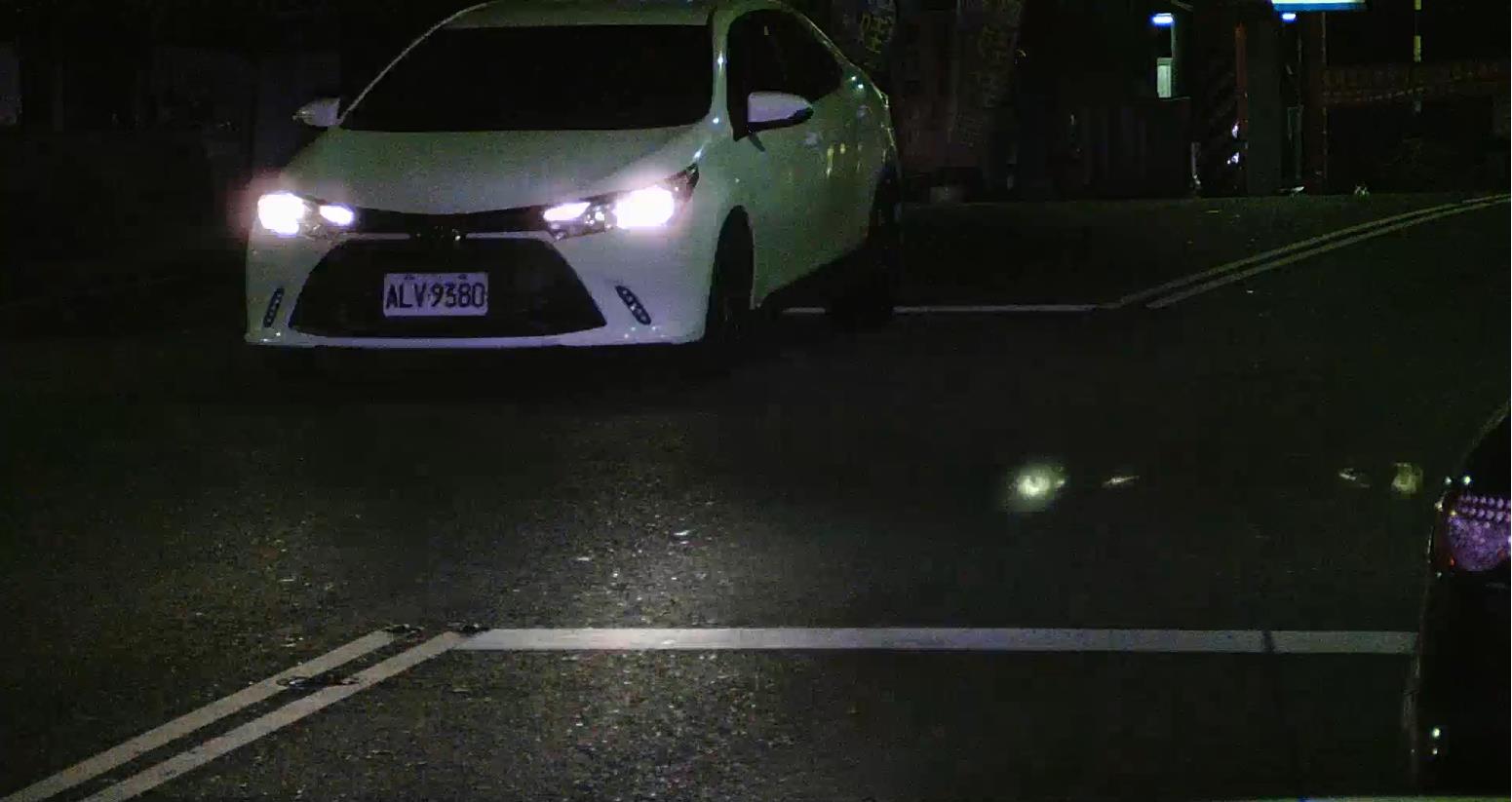
今天又是天還沒亮就遠端連線到車牌辨識現場工作,但昨天是到停車場抓鬼,今天則是到某個路邊研究區間測速的程式,因為我們希望軟體可以同時偵測雙向的車道,所以在資料處理過程中,除了要盡量辨識出車牌,也要能辨識車行方向。 譬如A站辨識到到某車是向著B站的方向而去,就要將此車牌與時間資訊傳給B站,待會B站也看到此車號時就可以計算車速了!相對的,如果A站測到某車是駛向與B站相反的方向,那就不必告訴B站了!我的設計是兩個測站都可以做一樣的事情,所以A與B站都可以測速,前提是另一個測站要先辨識到那一台車! 另一方面,A告知B,而B還沒看到的車數,就是在AB的區間駛向B還未到站的車數。反之亦然,所以將AB兩站的待測名單加起來就是兩站之間概略的車數了!此數據可以做為交通管制用的!在此會說「概略」是因為我們目前測試的場域不是隧道或橋梁等封閉路段,兩站之間會有很多路口,可以駛離或駛進這個路段。如果是封閉路段,誤差就只是車牌辨識率的差距了! 今天要調整測試的主要是方向辨識的功能,但是剛好在凌晨時段,也順便觀察一下夜間辨識的狀況,通常當然是低於日間辨識率的,但是從上圖的案例看起來,也還不錯!所謂方向辨識其實就是我們多次連續辨識成功時,同車號在畫面中移動的方向。好玩吧!概念如此,但是很多邊緣例外的狀況都要能妥善處理,才不會有太多誤判或無法判定,繼續上班囉!
|
|
| ( 心情隨筆|工作職場 ) |