字體:小 中 大
字體:小 中 大 |
|
|
|
| 2019/03/26 05:58:17瀏覽1424|回應0|推薦11 | |
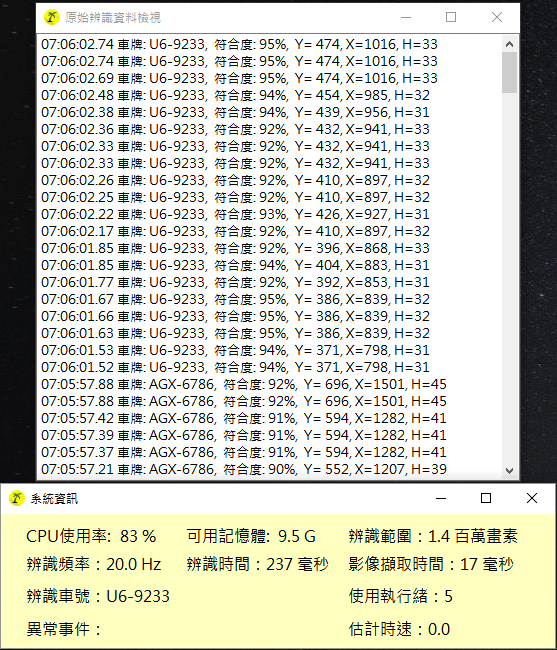
昨天在線上與花蓮稅務局溝通調整剛上線的車牌辨識系統,一開始他們覺得辨識速度「有點慢」!他們是用i5等級CPU的電腦,每秒大約辨識10次,就是十張百萬畫素大小的影像,每張都作多車辨識,影像中任何可辨識的車牌都會一一辨識出來作為原始資料,這些蠻大量的資料再經過動態篩選統計,排除不確定的資料,也刪除重複資料,盡可能每一輛車作出一個輸出報告,就是一個車號與一張照片。
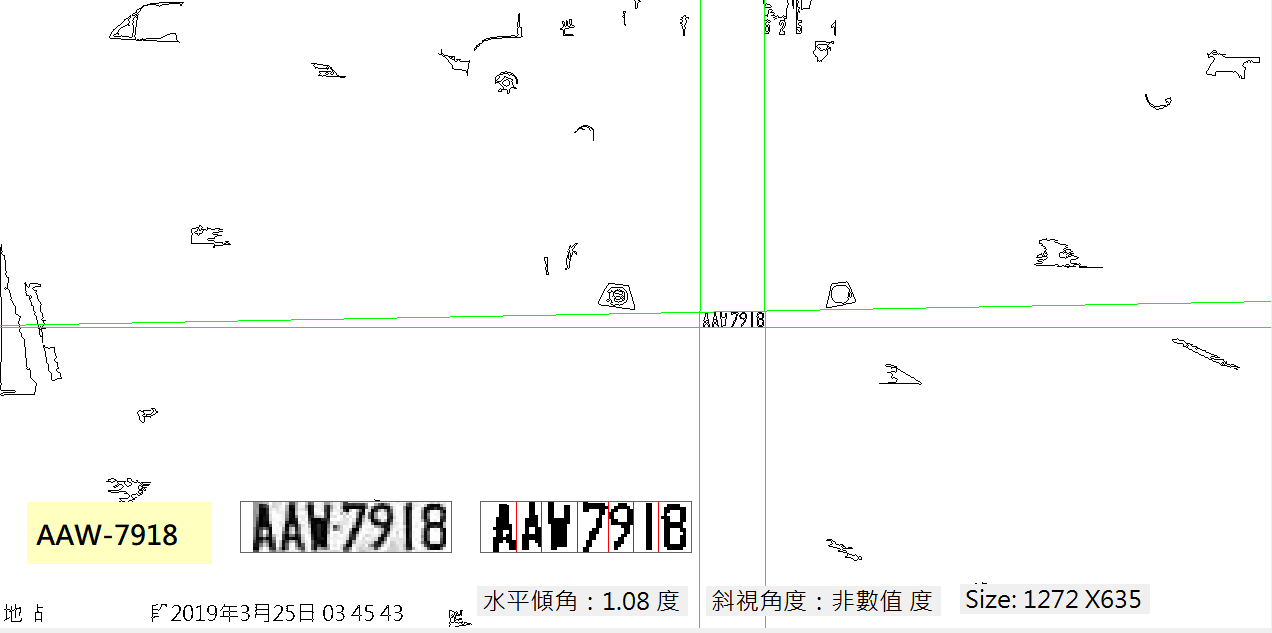
老實說,解釋完這些我的系統實際作到的事情,我想應該沒有人還好意思說我的軟體「太慢」了吧?內行人應該會覺得:「怎麼可能這麼快?」但確實可以這麼快,如果是i7等級的CPU還可以快到約20Hz,就是每秒辨識20次!一般來說,10Hz已經可以應付時速三四十公里車速的狀況,到20Hz就連七八十公里的車速都很OK了! 花蓮稅務局資訊室的技術人員是很用心的,他們的電腦短時間內無法更換升級,就想到我的軟體歪斜變形辨識能力超強,但他們的畫面中都是相當正面的車牌,如果可以「省下」變形處理的程序,是不是就可以辨識得更快了?其實看看下面兩張圖大家就知道,我的變形處理能力是基礎程序,不會影響辨識速度的!
我是先找出全圖中的車牌字元,再計算他們的邊緣切線,不管車牌是很正或很斜,我的辨識程序都是一樣的!如果我是先假設車牌是個標準的矩形,找不到再試著找梯形,再找不到就試著找平行四邊形,用這種嘗試錯誤的邏輯來鎖定車牌,那就是個災難了!我的辨識速度就絕對不可能那麼快的!這就是機器學習派常用的邏輯,所以即使他們用超級電腦都很難跟我競爭。 目前多數車牌辨識核心確實是假設車牌就是一定大小範圍的矩形,所以他們很難鎖定「不是矩形」的車牌!譬如傾斜或斜視導致變形的車牌影像,按照他們的邏輯就很難在全景圖中被鎖定了!傾斜15度,斜視45度就是他們能辨識的極限了!我可以確定他們遲早必須面對這個很基本的問題,學我這麼作的!我的極限是傾斜45度,斜視可達70度!幾乎只要車牌字元是清晰的就可以辨識! 我也不準備藏私,將這種辨識邏輯當作商業機密,即使你決定學我這麼作,需要研發的技術細節還是很多,我相信前人並不是沒想過可以這麼作,只是這條路比起用矩形框來找車牌,實在艱難太多了!稍懂影像辨識的人初步評估就會覺得太複雜了,還是不要吧?我則是太外行,沒栽進去之前不知道厲害,但是經過五六年的時間,我現在已經走過來了,好像愚公真的移山成功了,所以目前佔有一些優勢。 但是回到客戶的期望,他們無論如何還是希望辨識更快一點,10Hz確實有點慢。一個辨識流程複雜到有好幾千行的程式,當然總是有可以節省運算的空間,我經過一天的調整,根據現場的狀況,縮小辨識目標大小的範圍,簡化影像增強處理的程序,最後還是達到了20Hz的高標! 速度是夠快了!他們當然很滿意,但是測試了一陣子,又問我說能否定速到15Hz即可?因為經過路口的車輛車速不可能很快,頂多四五十公里吧?讓i5電腦跑到20hz,CPU會飆到八九十趴,好像會縮短電腦的壽命?別操太兇了吧?這個系統基本上是要全天候運作的!15Hz已經可以讓所有正面來的車都跑不掉了! 我的道路版軟體原本是沒有定速功能的,因為全景多車辨識對於多數電腦來說,永遠都不夠快的!好就像某些比賽用的單車是根本沒煞車的!但是我的停車場版的軟體是應付很低速的情境,為了盡量分配資源給更多車道同時進行辨識,所以是有定速功能的!那就給道路版裝個煞車就好了嘛!這也是立即作好!我的售後服務與系統最佳化的工作一天之內就讓客戶非常滿意了! 我的道路全景動態車牌辨識系統,可以說是第一次正式上線使用,但是以此為目標研發至少有三年了!真的能用,且以花蓮的場景來說,辨識率高過九成!或許局外人不知道,同樣目的的道路車牌辨識系統,全台灣至今沒有一處是這樣直接以全景畫面作辨識的!沒有例外,現有系統都是一車道一辨識模組,辨識核心也都是單車辨識,一次只辨識一輛車。 如果你看過網路影片上的多車辨識系統,我可以告訴大家:那些多半還是實驗性質,甚至是後製的特效!形象廣告的意義大於實質,當公家單位說要買時,他們就通通都不見了!真正敢出來銷售且接受嚴格公開驗收考驗的,我絕對是第一家!而且架構簡單售價極低,只需原來系統的幾乎十分之一!可見辨識軟體的進步可以帶來多大的經濟效益?接下來大家就繼續看吧!這種軟體一定是未來道路車牌辨識的主流,你不知道就落伍了! |
|
| ( 心情隨筆|工作職場 ) |