字體:小 中 大
字體:小 中 大 |
|
|
|
| 2018/09/06 06:45:12瀏覽1908|回應0|推薦8 | |
|
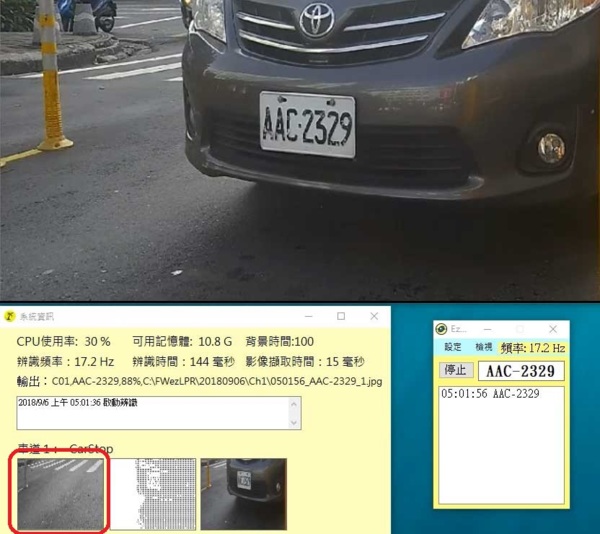
如上影片,我們積極研發大半年的動態辨識技術,即將加入我們的正式產品了!以前我的「動態」車牌辨識軟體其實只是連續的擷取畫面辨識「車牌」,實際上並沒有真的辨識「車子」!這種「動態」辨識比傳統上到了定位喀擦一張找車牌的「靜態」辨識好的地方,是我的資料多、辨識角度與距離多,就像買彩券,靜態辨識是買一張,動態辨識則是我家有錢嘛!買全餐!包中的! 但是這樣辨識的問題是:我會有一大堆對錯交織的資料,我其實無法直接判斷誰對誰錯?就連誰「比較」對都沒依據。那就採用民主機制吧!選票多的勝出。如果車牌真的很爛,對錯結果相當時就麻煩了!譬如遠看像B近看像8,應該是8比較對吧?我卻無法很直接地做這種判斷。 更極端一點,如果車牌爛到無法辨識呢?我會根本就不知道有車子來了?偶爾,根本沒車時,出現了一個很像車牌的目標,我的軟體可能會報出車號!那就是曾多次被客戶消遣的「幽靈車」了!我是老實人,不必等客戶爆料,我自己爆!我的現有軟體真的會有這種問題!如果你拿著一張印有車牌的A4紙張闖關,確實會成功的! 會有這些問題的關鍵,是因為我的車牌辨識程序和一般人「看車牌」的過程還是不一樣!我們都是先「看」到有車子來了,再依據車子的位置找到車牌加以辨識。如果我的車牌辨識程序中,根本沒有「看到車子」這個過程,當然就會出現以上的意外與誤判。譬如看到一輛車沒掛車牌想開進來,警衛一定會攔他下來問,我的軟體卻只當沒看到? 要「看車子」和「看車牌」的邏輯不同,車牌有固定的顏色格式,車子沒有!要鎖定車子最簡單的想法是「有車的影像減掉沒車的影像」,或者更簡單一點,時間軸上的前一張影像減掉後一張影像的亮度或顏色,不動的背景會趨近於零,有在動的目標區差值就很明顯!一般的簡單版動態偵測就是只作後者,但做過的都知道,其實非常不穩定! 我們研發這種技術很久的原因,是我們堅持一定要作出穩定可以參考的無車畫面的完整背景圖,就是下圖紅色框框中的影像:
以此為依據,每張即時影像減去應有的背景,差異影像就會非常穩定,車子進出時的概略大小、形狀與動作就很容易判斷了!所以我們可以決定出:CarIn, CarStop, CarLeave 與 NoCar等事件!有了這些穩定的資訊,我就可以知道對應時間軸上哪些車牌辨識結果是比較可靠的,CarStop時辨識的結果當然最好!NoCar時的辨識結果當然會被擋掉等等。 事實上,如果我知道沒車時,抓到影像也指觀測動態,不會呼叫辨識核心去找車牌的!系統因此「休假」時間就很明確充裕了!所以各位看影片中的CPU負荷是蠻低的。 我又洩漏太多商業機密了嗎?其實是我不忍心看後進們花太多時間在錯誤的方向,就是一直在時間軸的前後差異影像處理上作研究,那一定是徒勞的!但是如何建立穩定的「無目標背景影像」真的很難!因為背景也是會變的,早上中午晚上都不會一樣,所以背景影像也要隨時動態更新,還不能夾雜到任何會動的目標!這一部分的細節我就當商業機密暫時保留了! 這篇文章對於我的專業級客戶來說是很重要的!我就是希望讓所有在意細節,重視品質的專家級客戶愛上我的產品!更穩定、正確且合理的辨識結果是我永不停止的追求目標!下一個目標我就會嘗試辨識車子的形狀與顏色等資訊,直接告訴你來者何「車」了! |
|
| ( 心情隨筆|工作職場 ) |