字體:小 中 大
字體:小 中 大 |
|
|
|
| 2017/12/07 08:17:59瀏覽806|回應0|推薦4 | |
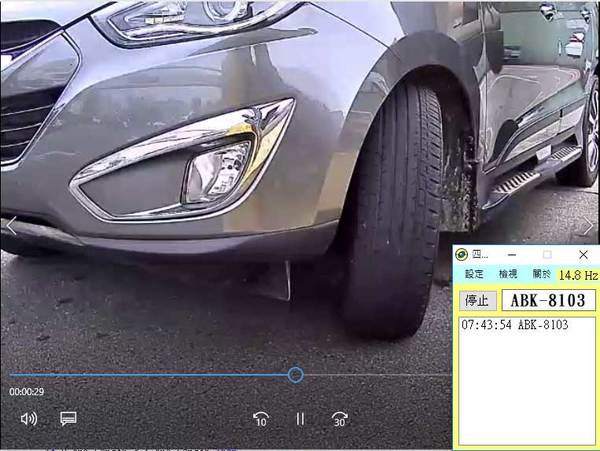
我專注研究車牌辨識四年半了!前面兩年半主要集中火力在研究如何提高單張影像辨識的正確率。但是從去年初至今,主要的功夫都花在「動態」辨識!就是如何連續大量辨識串流影像中移動中的車牌,再用統計篩選的方式,從大量原始辨識結果中「判斷」出正確的車號。 我可以作到動態辨識的前提是:首先單張辨識速度就必須很快,還要加上多執行緒的支援,讓實際辨識速度更增加好幾倍!所以我的主力產品才可以同時動態辨識四個車道,每個車道都可以一秒取樣至少十幾次!我現在的辨識核心面對百萬畫素影像辨識車牌的時間已經低於0.1秒了!如果是一張0.4秒其實無礙我推出商業化產品,但是要作動態辨識就不太可能了! 但是這麼辛苦研發的好處在哪裡?值得我花上兩年的時間研發嗎?傳統上就是在車輛進入容易辨識的角度時拍個一兩張來辨識就好了!我堅持將動態作好的著眼點有兩個:一是讓使用者不必刻意去找到「何時是好的角度?」據此控制拍照時機;一是當車牌真的很難辨識(有汙損),或「可拍攝的角度始終不佳」時,也能盡量從大量對錯參雜的原始辨識結果中找出「比較對」的結果! 下面是一個很精彩的例子,足以說明我真的作到了!這是在北部某個停車場拍的短片,車子斜進斜出,穿過畫面的整個過程都未曾比較正面的面對攝影機,即使是我的辨識核心很厲害,辨識正確的機率還是不到一半的!但是經過大量資料的分析篩選,我還是可以正確辨識成功哦!
上面的原始資料顯示我從06:50:24.63到06:50:26.39,這1.76秒之間連續作了31次的有效辨識,辨識結果當然有對有錯,統計如下: 181-03, 2次 BK-8103, 3次 ABW-8103, 2次 ABK-8103, 10次 ABK-8105, 4次 IB-8103, 1次 BI-8103, 2次 UBK-8103, 1次 IKB-1031, 1次 ABI-8103, 1次 ABK-810, 1次 UBK-8105, 1次 ABB-8105, 2次 目視結果正確的ABK-8103出現次數不到總次數的三分之一!有點像選舉最高票還沒過半。但是考慮其他的候選車號出現次數都很少,再考慮單張辨識的符合度,ABK-8103每次出現時的符合度都很高!所以我還是可以輕易判斷最正確的車號就是ABK-8103! 就是這種簡易的AI人工智慧,讓我的實質正確辨識率再度提升!目前我的研發還沒停止,我今年初開始賣出大約十多套這種軟體,每一個安裝場域至今都還會得到我的關注與最佳化調整升級與維護,這是銷售,也是持續的研發過程,它們(軟體)一定會越來越聰明的!也代表買到我產品的客戶,東西買回家之後還會越來越好用! 所以我不想跟著其他車牌辨識廠商削價競爭,寧願陪著願意付出合理價格,以得到我的服務保證,也願意回饋資料讓我繼續作精進研發的廠商們攜手前進。我也希望包括潛在買家在內的讀者們,大家都能多一點有關車牌辨識的專業知識,我不是只想作出跟大家一樣的車牌辨識系統來賣的!我天天都在想著「未來」的車牌辨識系統會如何發展?希望我作的永遠是最先進的產品。我這種博士教授的個性,在公司沒窮到倒閉之前是不會改變的! |
|
| ( 心情隨筆|工作職場 ) |